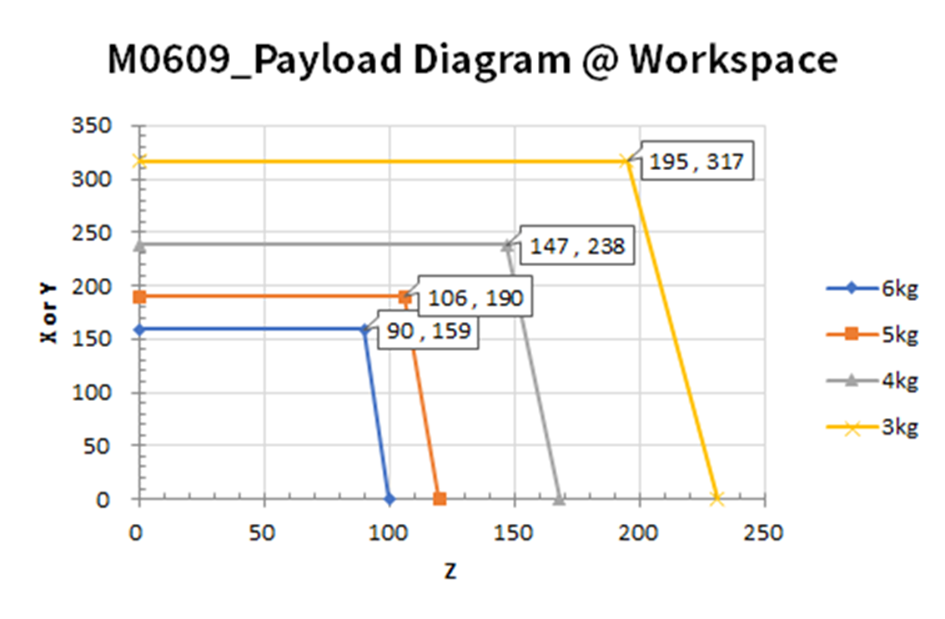
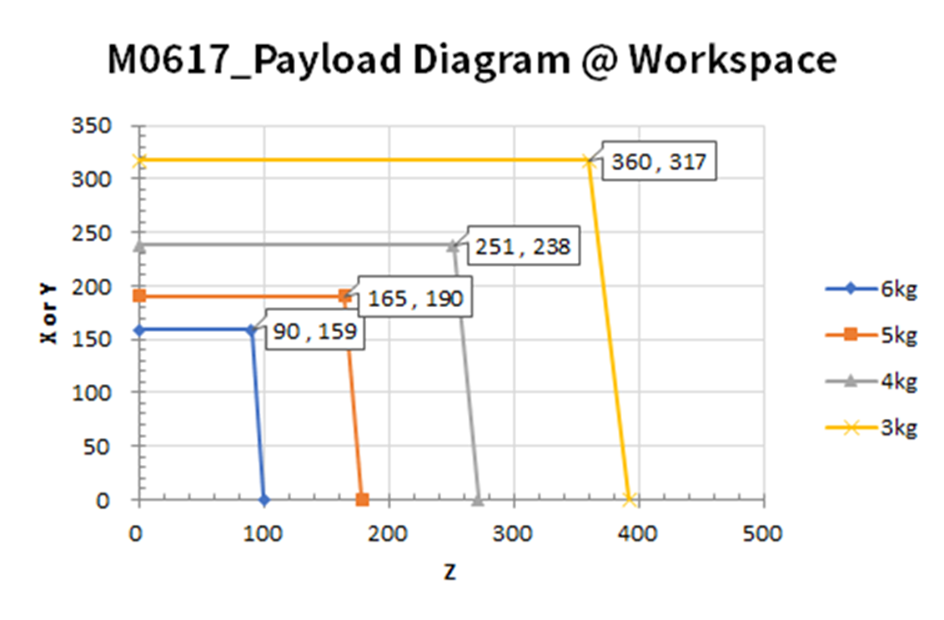
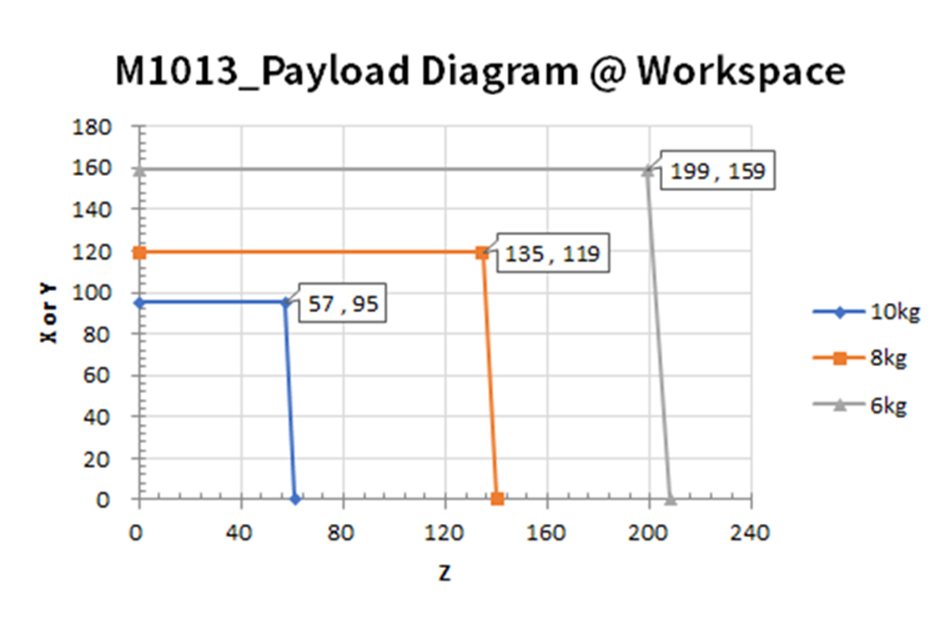
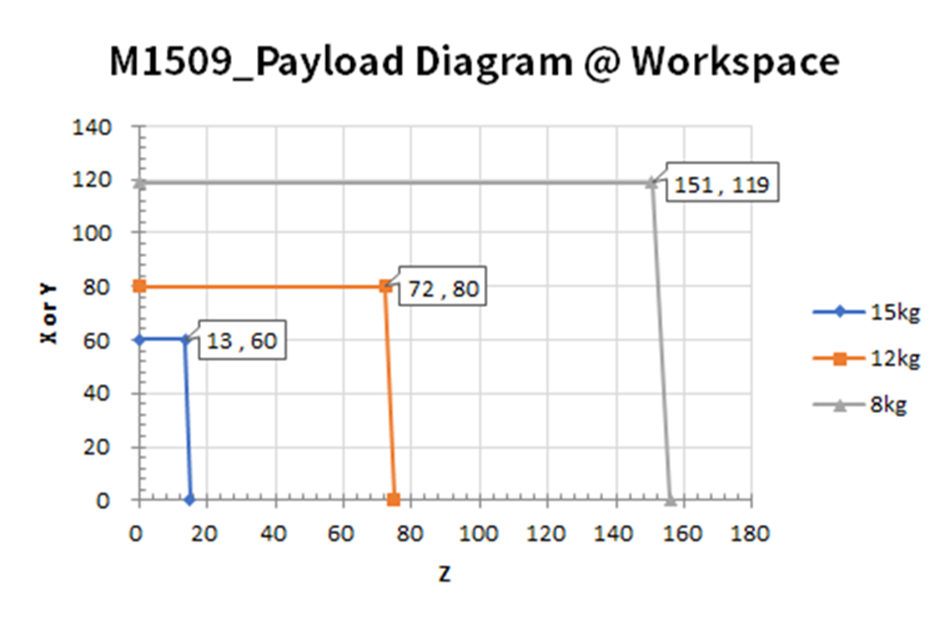
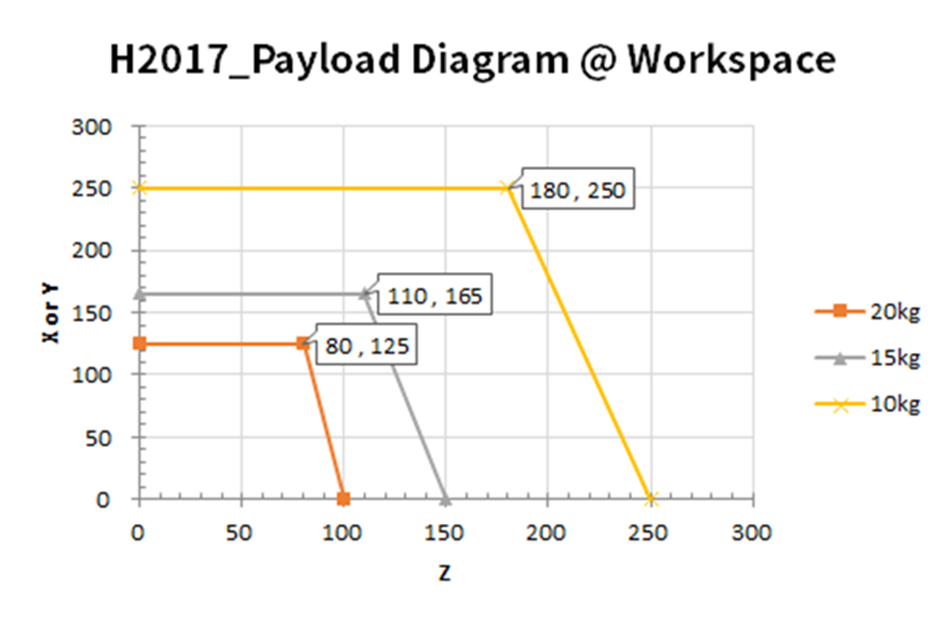
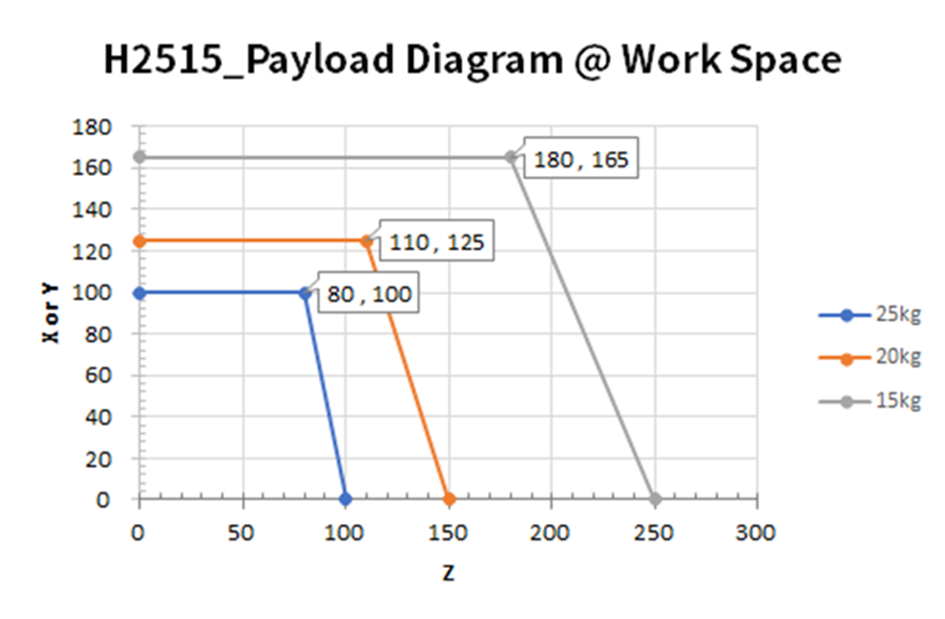
Maximální nosnost robota v jeho operačním prostoru se mění podle vzdálenosti od těžiště. Nosnost podle vzdálenosti je následující:
Teto diagram zátěže předpokládá malý objem zátěže nástroje. Nástroje s větším objemem budou mít ve srovnání s nástrojem stejné hmotnosti ale menším objemem větší omezení, když je zátěž nad těžištěm, protože v takových případech může dojít k vibracím.
M0609
M0617
M1013
M1509
H2017
H2515
Povolený moment a setrvačnost
Povolený moment a setrvačnost pro robota J4-J6 jsou následující:
|
Název modelu
|
J4 |
J5 |
J6 |
|||
|---|---|---|---|---|---|---|
|
Povolený moment |
Setrvačnost |
Povolený moment |
Setrvačnost |
Povolený moment |
Setrvačnost |
|
|
M0609 |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
|
M0617 |
||||||
|
M1013 |
||||||
|
M1509 |
||||||
|
H2017 |
145 Nm
|
8.0 kg㎡
|
81Nm |
4.5 kg㎡
|
36 Nm
|
2.0 kg㎡ |
|
H2515 |
||||||