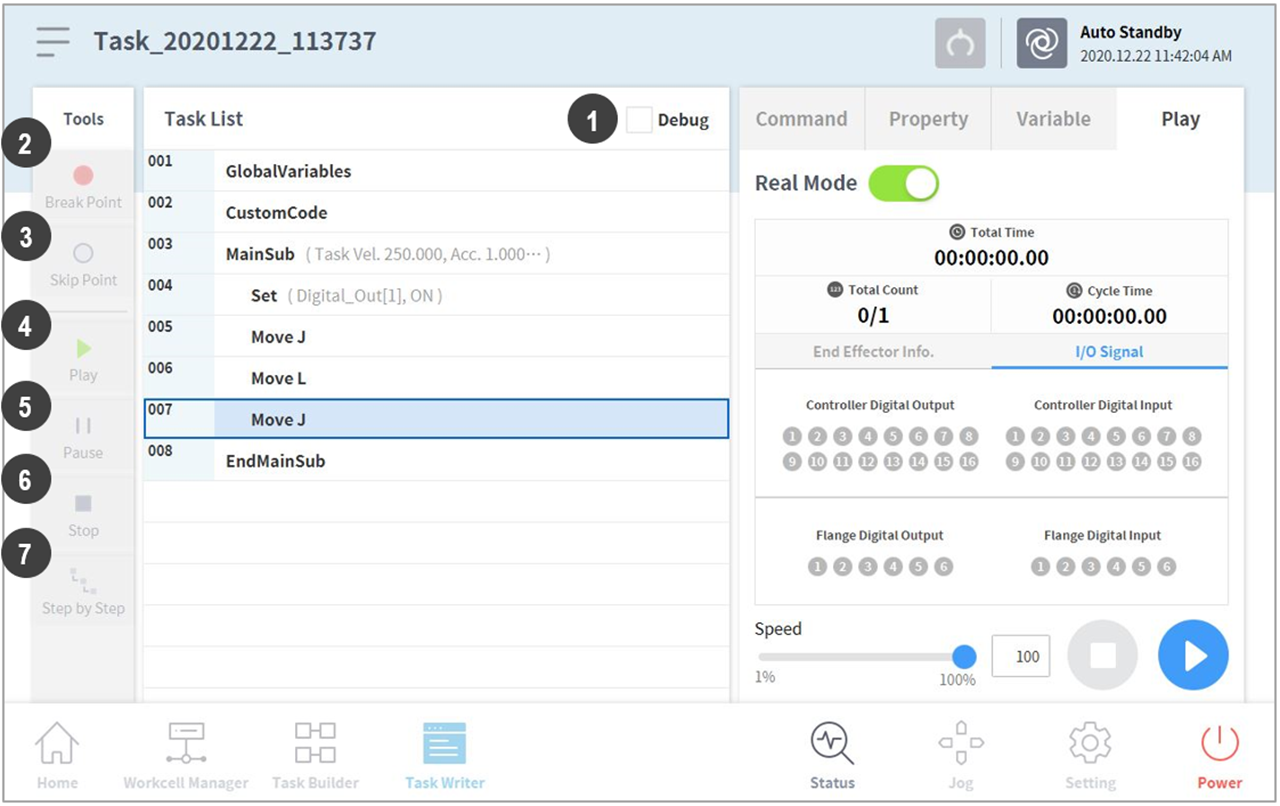
Der Debug-Modus des Bildschirms „Task Writer“ (Aufgabe schreiben) ist wie folgt strukturiert.
|
Nr. |
Element |
Beschreibung |
|---|---|---|
|
1 |
Debug |
Legt den Debug-Wiedergabemodus zum Testen des Roboters fest. |
|
2 |
Break Point Button |
Einen Umbruchpunkt in einem Befehl einrichten. Wird der Befehl nach Ausführung der Aufgabe erreicht, führt der Roboter die Aufgabe nicht aus, sondern stoppt. |
|
3 |
Skip Point Button |
Einen Überspringpunkt in einem Befehl einrichten. Wird der Befehl nach Ausführung der Aufgabe erreicht, führt der Roboter die Aufgabe nicht aus. |
|
4 |
Play/Restart Toggle Button |
Führt die Aufgabe im Debug-Modus aus. Wird der Unterbrechungspunkt während der Aufgabenausführung erreicht oder wird die Aufgabe angehalten, wird die Schaltfläche „Play“ (Wiedergeben) zur Schaltfläche „Restart“ (Neu starten). |
|
5 |
Pause Button |
Hält die Ausführung der aktuellen Aufgabe vorübergehend an. |
|
6 |
Stop button |
Stoppt die aktuelle Aufgabe. |
|
7 |
Stage by Stage |
Führt jeweils einen Befehl aus, wenn die Aufgabe angehalten ist. |