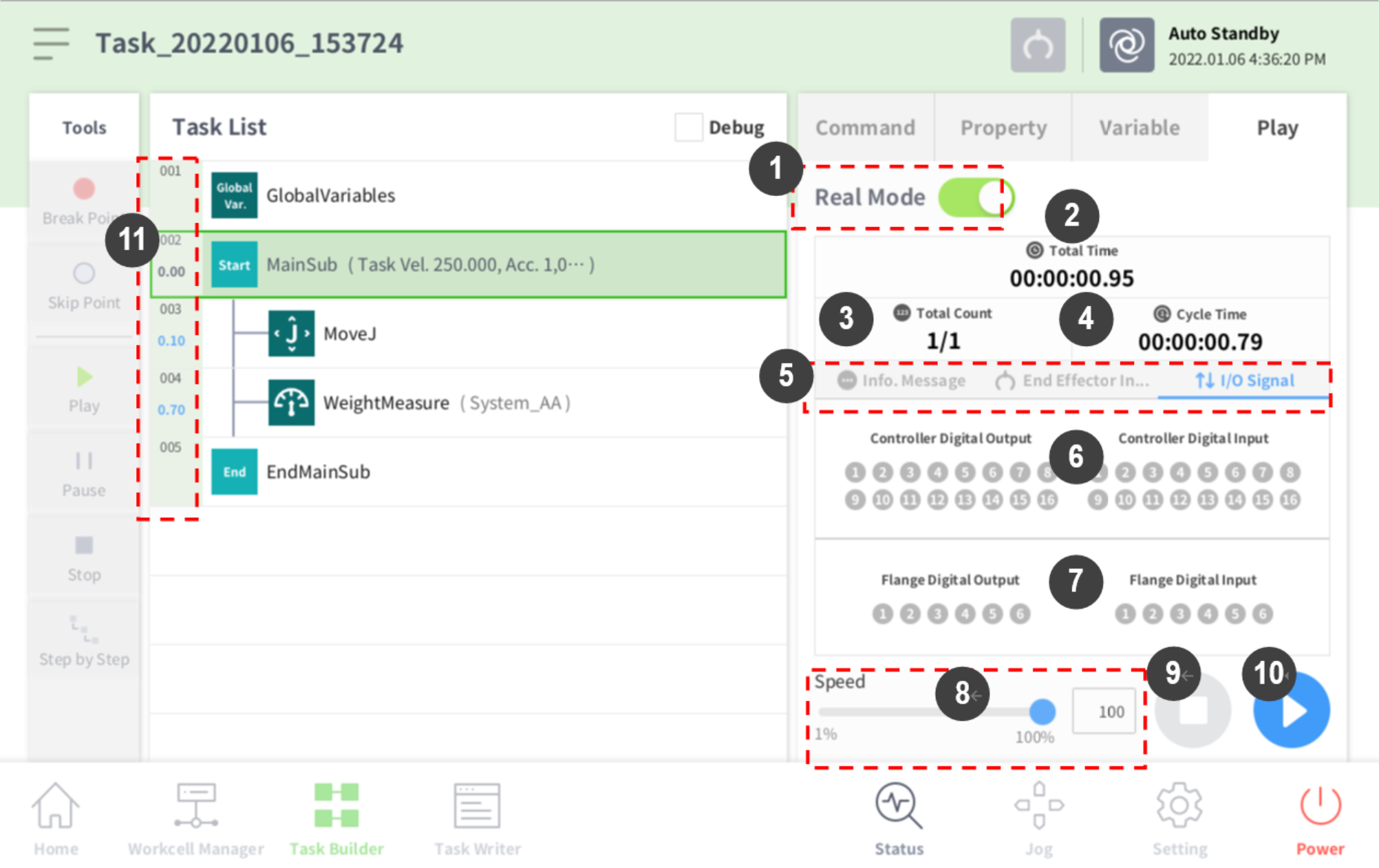
Der Bildschirm für Wiedergabe des realen Modus der Registerkarte „I/O Information“ (E/A-Informationen) im Task Builder (Aufgabenstruktur erstellen) ist wie folgt strukturiert:
|
Nr. |
Element |
Beschreibung |
|
1 |
Real mode ( |
Legt den Wiedergabemodus des Robotertests fest.
|
|
2 |
Total time |
Zeigt die nach Aufgabenausführung insgesamt verstrichene Zeit an. |
|
3 |
Total count |
Zeigt die Gesamtzahl der ausgeführten Aufgaben an. |
|
4 |
Average execution time |
Zeigt die durchschnittlich benötigte Zeit für die Ausführung eines Zyklus einer Aufgabe in der Aufgabenliste an. |
|
5 |
Information Screen Shift Tab |
Sie können zwischen dem Roboter-Informationsnachricht, dem Endeffektor-Informationsbildschirm und dem Eingabe-/Ausgabe-Informationsbildschirm umschalten.
|
|
6 |
Controller digital I/O signal |
Zeigt die Digital-E/A-Signale des Steuergeräts für die aktuelle Aufgabe an.
|
|
7 |
Flange digital I/O signal |
Zeigt die Digital-E/A-Signale des Flansches für die aktuelle Aufgabe an.
|
|
8 |
Speed slider |
Steuert die Geschwindigkeit des Roboterbetriebs in der Betriebsart Real oder Virtuell. |
|
9 |
Stop button |
Stoppt die aktuelle Aufgabe. |
|
10 |
Execute/pause toggle button |
Führt die Aufgabe in der Aufgabenliste aus oder hält sie an. |
|
11 |
Time |
Zeigt die für die Ausführung des entsprechenden Befehls beanspruchte Zeit an. |

Bildschirm für Eingangs-/Ausgangsdaten (I/O) in Serie A überwacht lediglich 2 Flansch-Eingänge/-Ausgänge (I/Os).