|
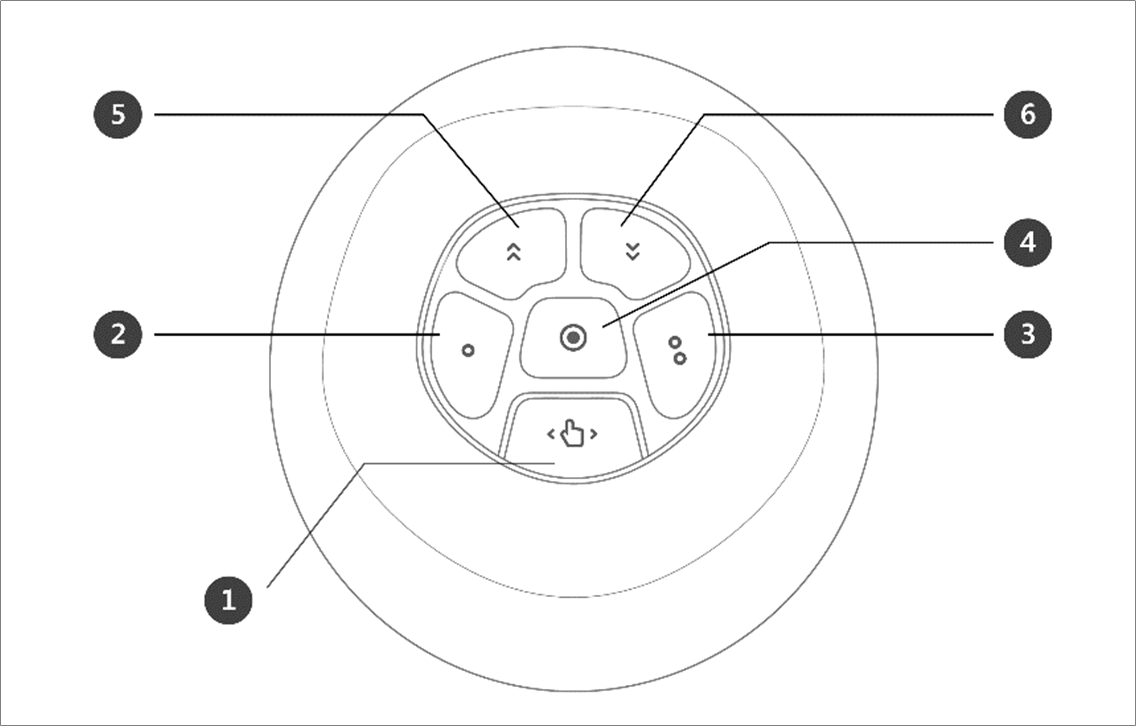
No. |
Element |
Beschreibung |
|---|---|---|
|
1 |
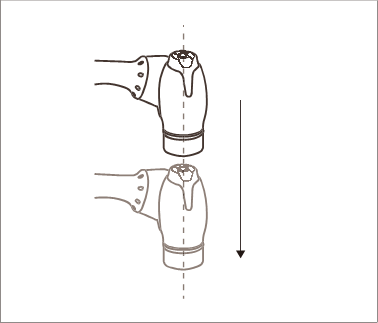
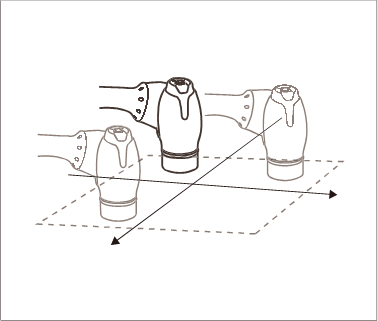
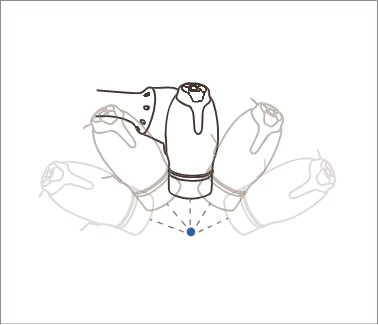
Hand-Guiding Button |
Mit dieser Taste kann die Roboterstellung angepasst oder geändert werden. |
|
2, 3 |
Benutzereinstellungstaste |
Diese Schaltfläche kann die Stellung des Roboters durch Eingabe einer Stellung entsprechend eines einer Betriebsart zugeordneten Sperrzustands verändern.
Weitere Informationen zu den Einstellungen siehe „Einrichtung des Steuerpults (Cockpit)”. |
|
4 |
Save Pose Button |
Speichert die aktuelle Roboterstellung. Weitere Informationen finden Sie unter „Arbeitspunkteinstellung für Fertigkeitsbefehle mit Schaltflächen am Steuerpult”. |
|
5 |
One Line Up |
Verlagert den auf dem Bildschirm angezeigten Fokus um eine Zeile nach oben |
|
6 |
One Line Down |
Verlagert den auf dem Bildschirm angezeigten Fokus um eine Zeile nach unten |
Hinweis – Änderung der Einrichtung des Steuerpults (Cockpit)
-
Die Änderung der Einstellungen der



-
Bei Verwendung der Speichertaste für Stellungen im Bildschirm für die Einstellung der Fertigkeiten wird der Fokus automatisch zur nächsten Stellung verschoben.
-
Die Schaltfläche „Cancel“ (Abbrechen) kann nur im Fenster für „Skill Setting“ (Einstellung von Fertigkeiten) verwendet werden, in dem mehrere Stellungen verwaltet werden.