Obbligatorio Normale 10 min
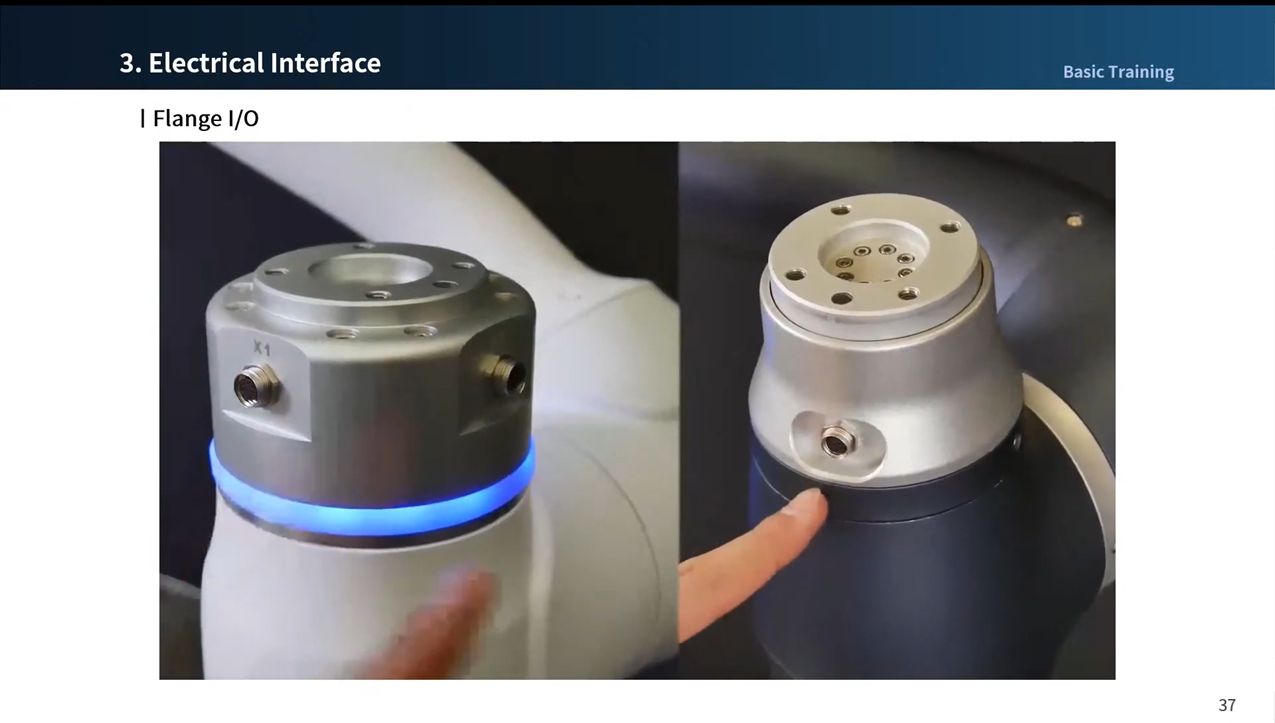
Collegare i cavi necessari ai connettori i/o a flangia dopo aver fissato l'attrezzo. È necessario controllare la mappa dei pin dell'i/o della flangia.
-
Quando l'alimentazione è fornita al robot, il quinto terminale di ciascun connettore emette sempre 24V.
-
Per ulteriori informazioni, fare riferimento Flangia I/Oa .
-
Assicurarsi di interrompere l'alimentazione del robot quando si collega l'utensile e la pinza.
-
Assicurarsi di configurare le misure dell'utensile e della pinza per evitare che i pezzi cadano dall'utensile quando l'alimentazione del robot viene interrotta.
Per controllare/monitorare il robot utilizzando un dispositivo esterno, collegare l'i/o del controller o connettersi a una rete, ad esempio Modbus TCP, PROFITNET o Ethernet/IP.
-
Per ulteriori informazioni, fare riferimento Collegamento I/O centralina di comandoa .
-
Per ulteriori informazioni, fare riferimento Connessione di retea .