Manipulator
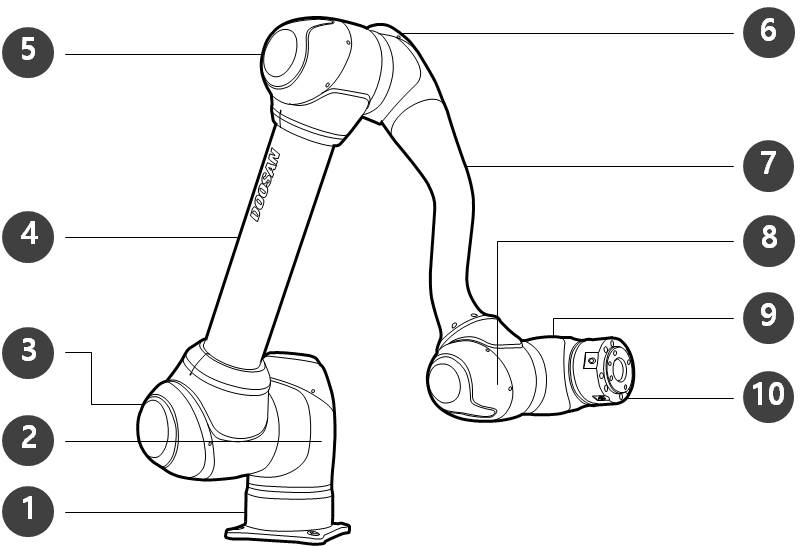
Denominazione dei componenti
|
N. |
Nome |
N. |
Nome |
|---|---|---|---|
|
1 |
Base |
6 |
J4 |
|
2 |
J1 |
7 |
Link2 |
|
3 |
J2 |
8 |
J5 |
|
4 |
Link1 |
9 |
J6 |
|
5 |
J3 |
10 |
Tool flange |
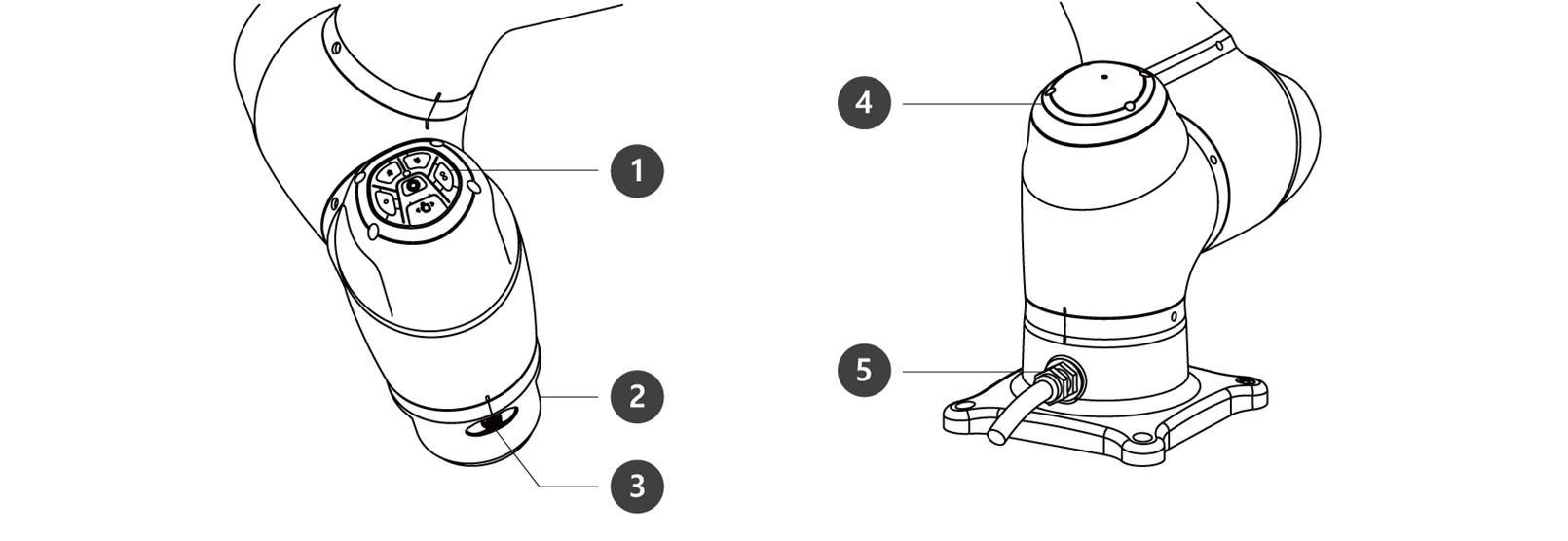
Caratteristiche principali
|
N. |
Voce |
Descrizione |
|---|---|---|
|
1 |
Cockpit |
[Opzione] Controller utilizzato per l'apprendimento diretto |
|
2 |
Tool flange |
Area per l'installazione degli utensili. |
|
3 |
Flange I/O |
Porta I/O per controllo utensile.
|
|
4 |
LED (1-axis) |
Visualizza lo stato del robot in colori differenti. Per maggiori informazioni sullo stato del robot, vedere “ (2.12-it_IT) Stato e colore del LED Flangia in ciascuna modalità” |
|
5 |
Connector |
Utilizzato per alimentare e comunicare col robot. |
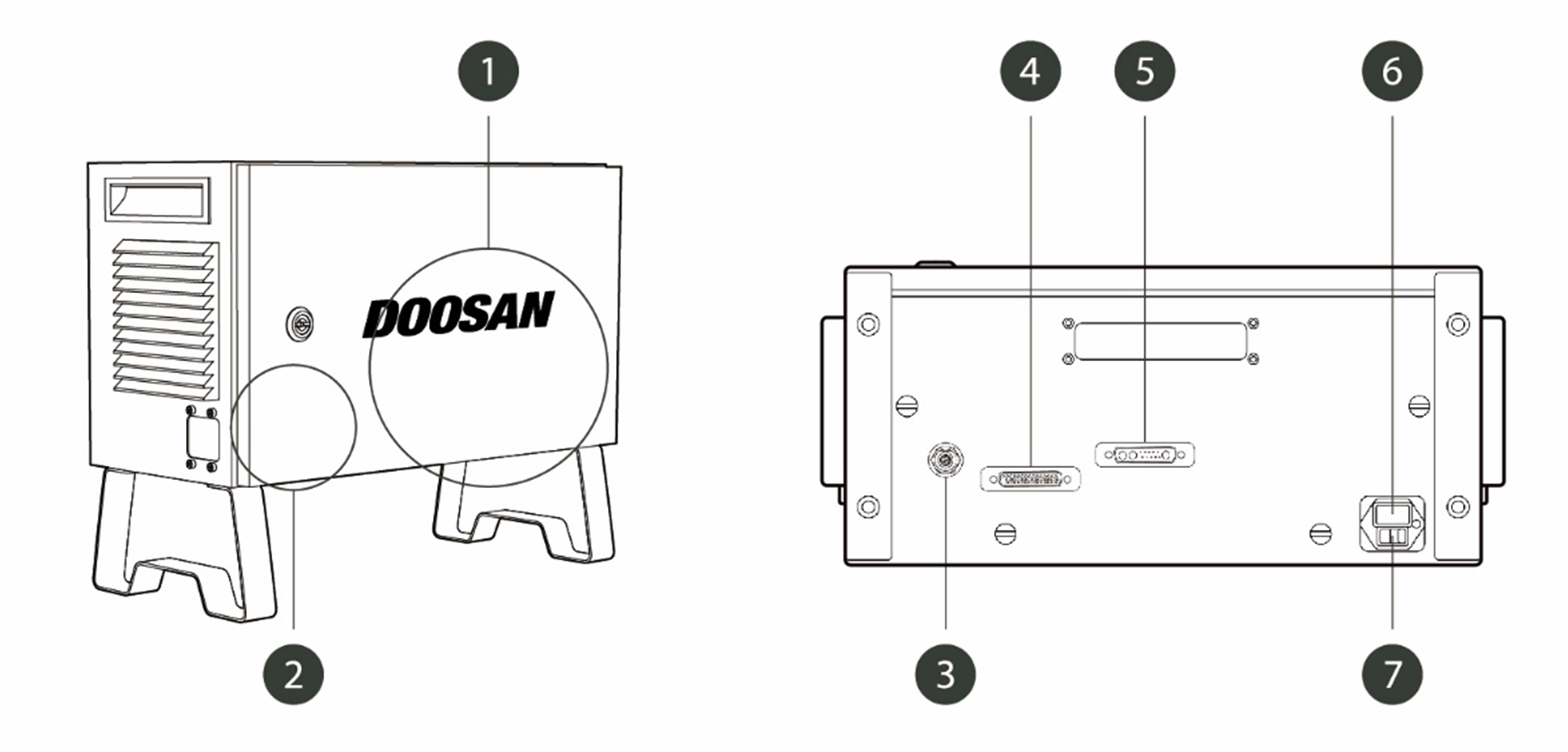
Centralina di comando
|
N. |
Voce |
Descrizione |
|---|---|---|
|
1 |
I/O connection terminal (internal) |
Utilizzato per collegare la centralina di comando o le periferiche. |
|
2 |
Emergency stop button setting switch |
Per utilizzare la Teach Pendant (console portatile), la Smart Pendant (console intelligente) o i pulsanti Emergency Stop (arresto di emergenza), lo switch deve essere impostato in modo da rispecchiare la configurazione effettiva.
|
|
3 |
Emergency stop button and smart pendant connection terminal |
Collega il pulsante di arresto di emergenza o il cavo dello Smart Pendant alla centralina di comando. |
|
4 |
Teach pendant cable connection terminal |
Utilizzato per collegare il cavo del Teach Pendant alla centralina di comando. |
|
5 |
Manipulator cable connection terminal |
Utilizzato per collegare il cavo del robot alla centralina di comando. |
|
6 |
Power connection terminal |
Utilizzato per collegare l'alimentazione della centralina di comando. |
|
7 |
Power switch |
Utilizzato per attivare/disattivare (ON/OFF) l'alimentazione di rete alla centralina di comando. Per ulteriori informazioni, vedere Accensione/Spegnimento del sistema |
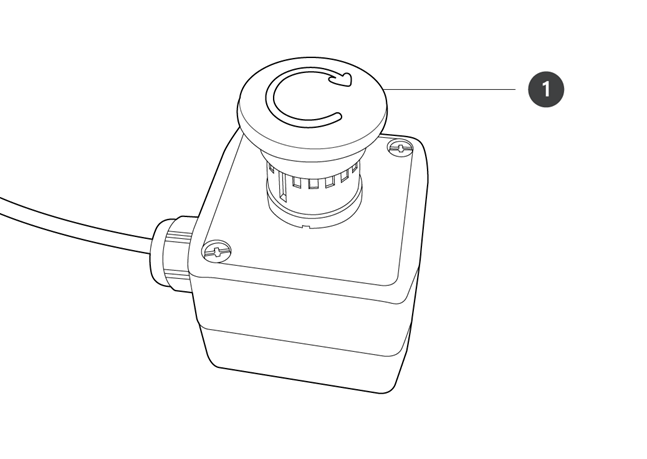
Pulsante di arresto di emergenza
|
N. |
Voce |
Descrizione |
|---|---|---|
|
1 |
Pulsante di arresto di emergenza |
In caso di emergenza, premere il pulsante per arrestare il funzionamento del robot. |
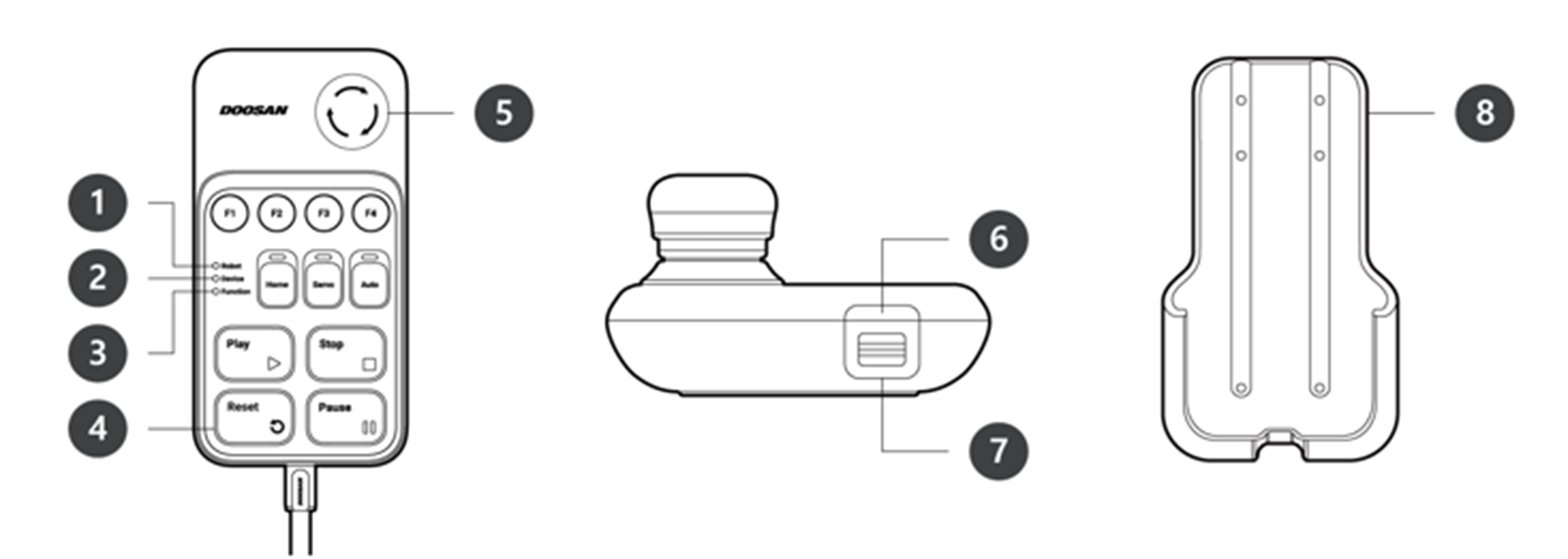
Smart Pendant
Lo Smart Pendant non è un elemento standard ma opzionale, quindi dev'essere acquistato separatamente
Per ulteriori informazioni, vedere Appendice. Smart Pendant (A Series) (Console intelligente).
|
N. |
Voce |
Descrizione |
|---|---|---|
|
1 |
Robot LED |
Utilizzato per indicare lo stato del robot visualizzando all'utente lo stesso colore del LED di stato del robot. |
|
2 |
Device LED |
Utilizzato per indicare se il sistema è entrato in modalità Smart Pendant. |
|
3 |
Function LED |
Premendo i quattro pulsanti del segnale di ingresso (F1-F4) si illumina il LED, che indica lo stato della pressione. |
|
4 |
Buttons |
Sono presenti 11 pulsanti in totale che includono quattro pulsanti di segnale di ingresso (F1-F4) per ciascuna funzione, home, servo, auto, play, stop, resume e pause. |
|
5 |
Emergency Stop Button |
In caso di emergenza, premere il pulsante per arrestare il funzionamento del robot. |
|
6 |
Power Button |
Utilizzato per attivare/disattivare (ON/OFF) l'alimentazione di rete allo Smart Pendant. |
|
7 |
Strap Anchor |
Utilizzato per aggiungere una cinghia al dispositivo. |
|
8 |
Holder bracket |
Montare la staffa di supporto su una parete per riporre lo Smart Pendant. |
-
Per l'utilizzo di SW V2.8 o successivo, attaccare l'etichetta di ripristino al pulsante Riprendi sul ciondolo intelligente.
-
Se viene utilizzata una versione precedente a SW V2.8, non è necessario allegare l'etichetta di ripristino. In quella versione, il pulsante di ripristino in Smart Pendant funziona come una funzione di ripristino, non come funzione di ripristino.
-
L'etichetta potrebbe staccarsi durante l'uso, quindi fai attenzione.
Console portatile
Il Console portatile non è un elemento standard ma opzionale, quindi dev'essere acquistato separatamente 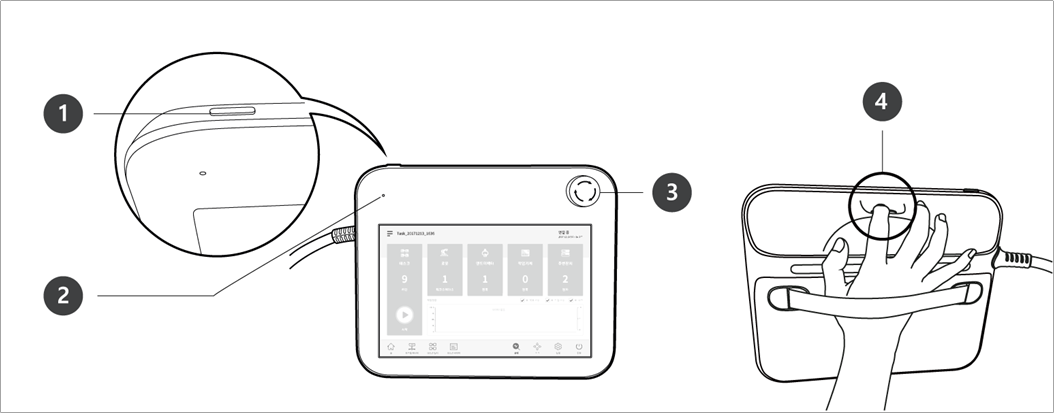
|
N. |
Voce |
Descrizione |
|---|---|---|
|
1 |
Power button |
Utilizzato per attivare/disattivare (ON/OFF) l'alimentazione di rete al Console portatile. Per ulteriori informazioni, vedere Accensione/Spegnimento del sistema |
|
2 |
Power LED |
Si illumina quando l'alimentazione elettrica è presente. |
|
3 |
Emergency Stop Button |
In caso di emergenza, premere il pulsante per arrestare il funzionamento del robot. |
|
4 |
Hand guiding button |
Tenere premuto il pulsante per muovere liberamente il robot nella posizione desiderata. |
Se si intende proteggere e tenere la console portatile durante il lavoro, è possibile utilizzarla in modo più semplice e sicuro utilizzando la custodia morbida fornita da Doosan Robotics