Obbligatorio Facile 3 min

Il robot è nella sua posa di imballaggio per consentire un facile trasporto o imballaggio. Per utilizzare il robot, è necessario disimpegnare la posa di imballaggio. Poiché il robot mantiene una posa che supera il limite dell'angolo del giunto quando si trova nella posa di imballaggio, è impossibile impostare lo stato Servo ON a causa della violazione del limite di sicurezza. In questo stato, il LED del robot si illumina di rosso.
Se si verifica un caso in cui è necessario imballare il robot a causa del riposizionamento, impostare la posa della confezione utilizzando Sposta con posa della confezione nella modalità di imballaggio.
Il processo di rilascio della posa di confezionamento è il seguente:
-
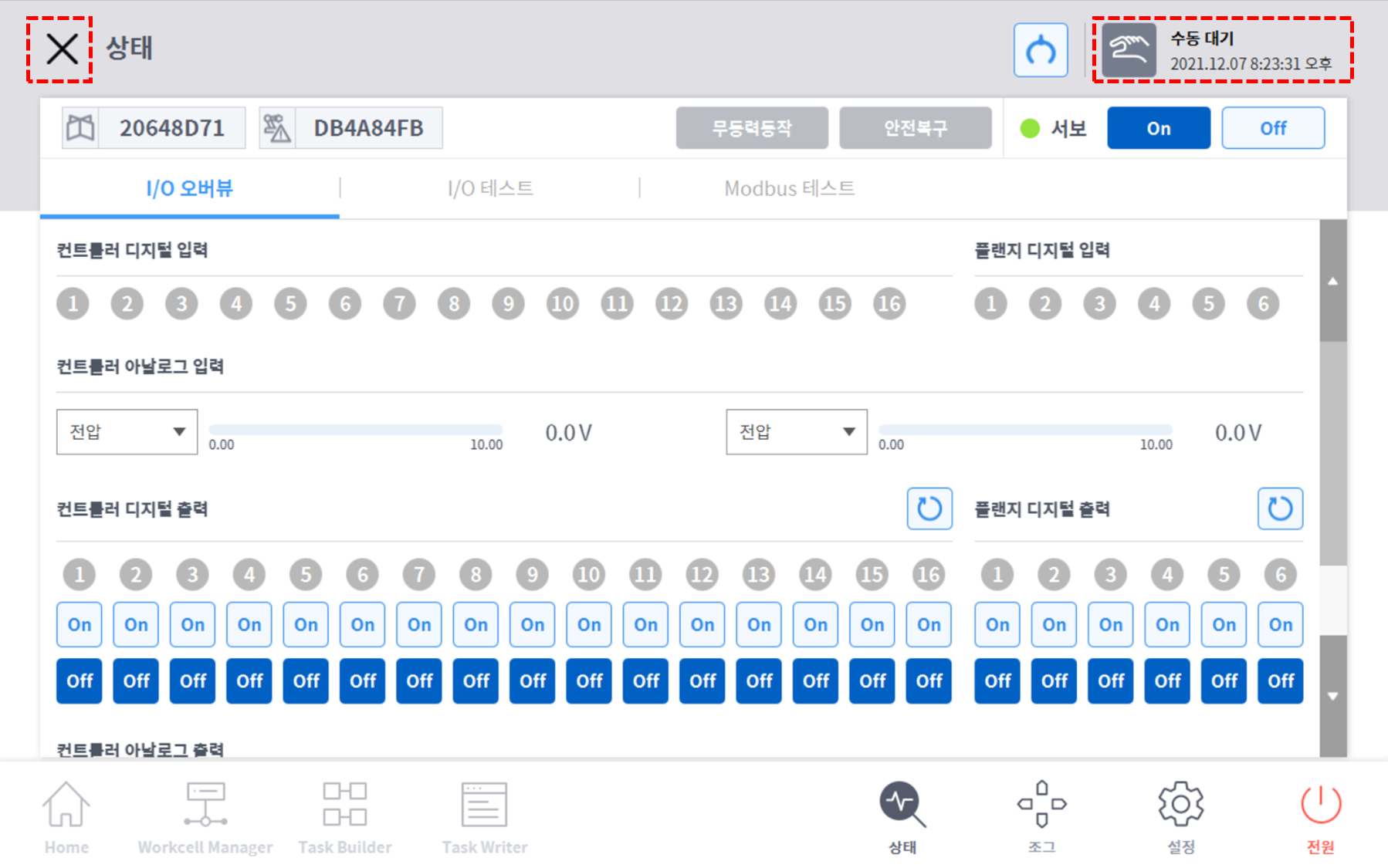
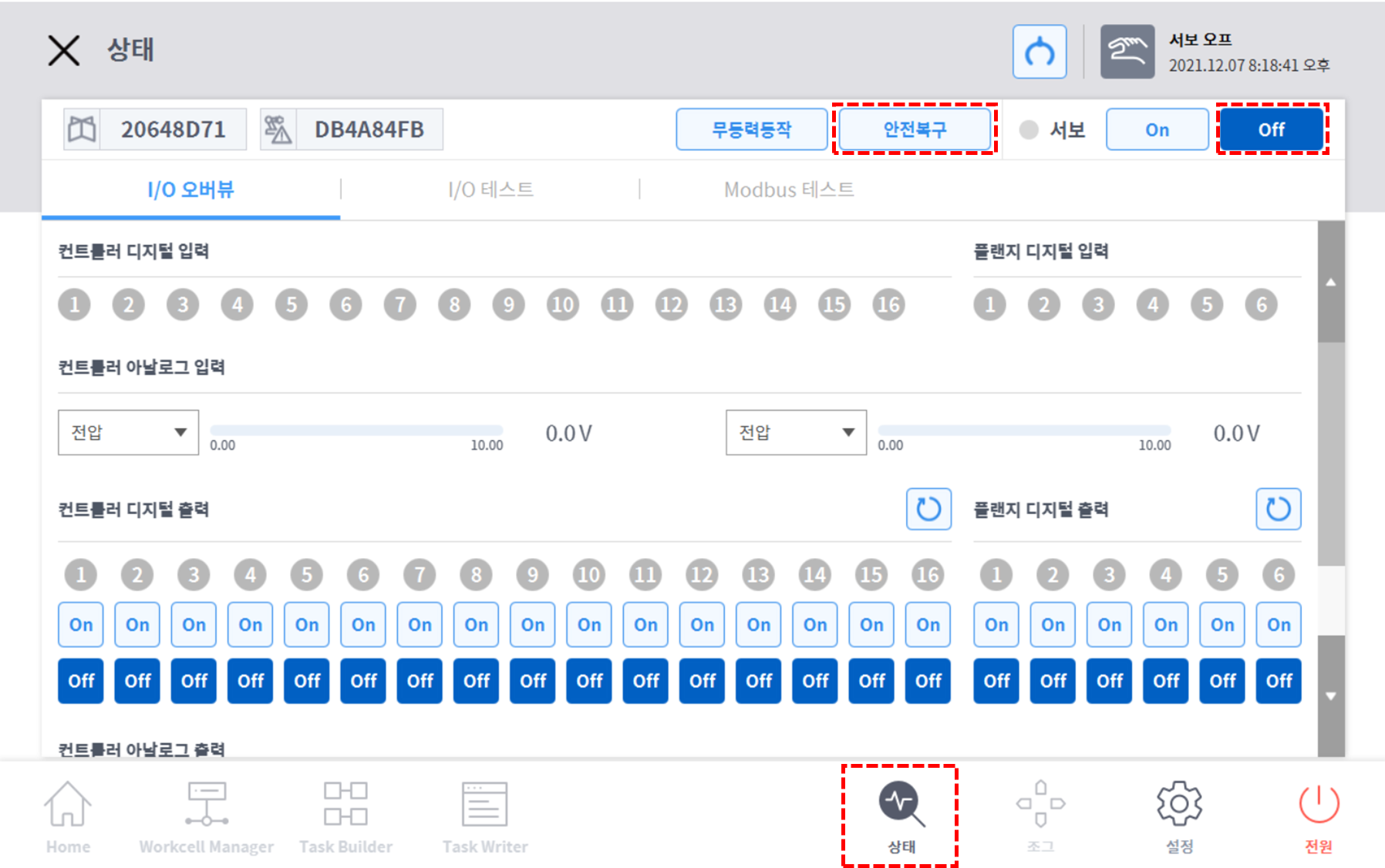
Toccare status (Stato ) sulla schermata iniziale del teach pendant.
-
Toccare il pulsante Ripristino di sicurezza . Il pulsante di recupero di sicurezza è abilitato quando si trova nello stato Servo Off .
-
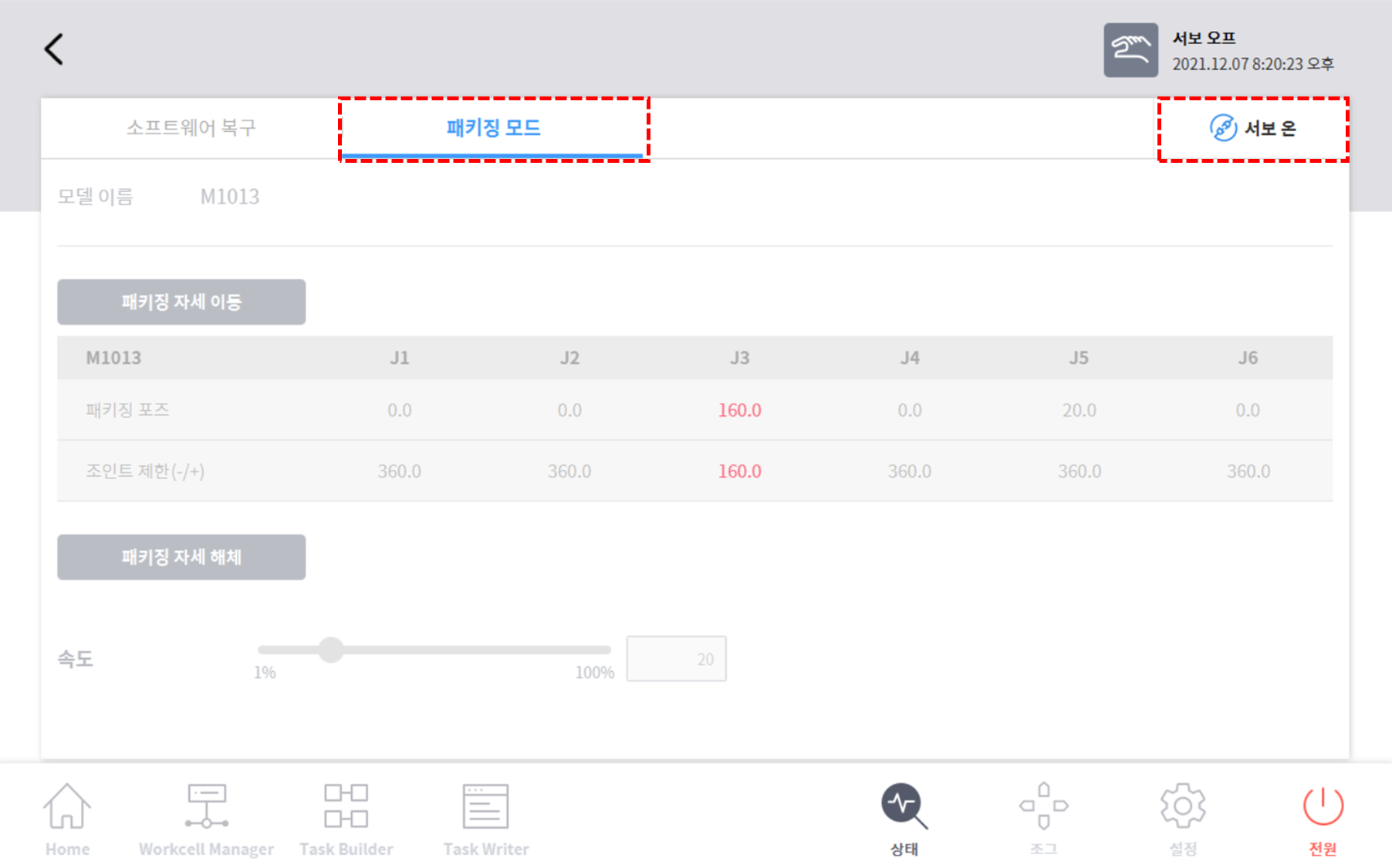
Selezionare la scheda modalità imballaggio .
-
Toccare il pulsante Servo on .
-
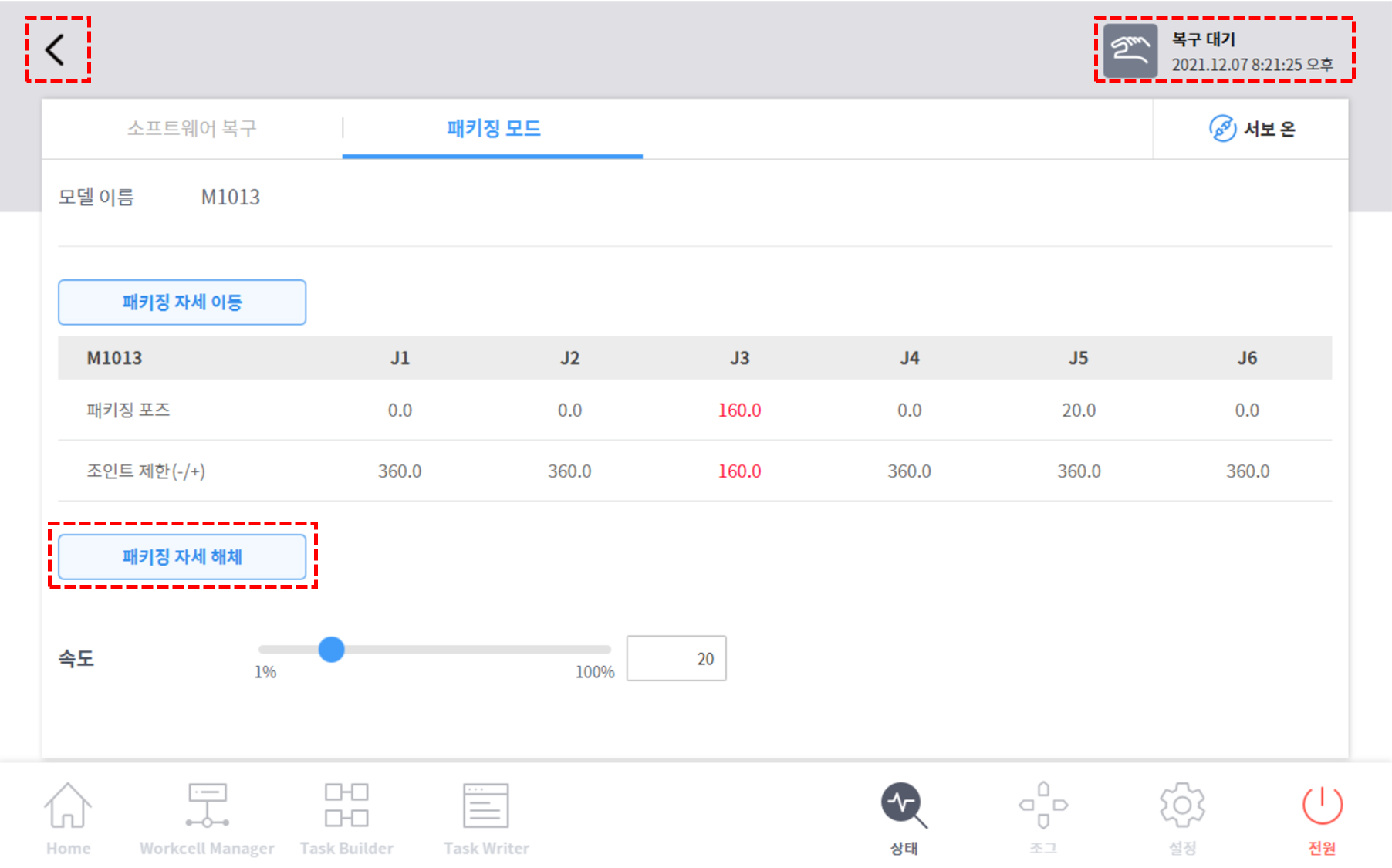
Il display di stato del robot nella parte inferiore destra della schermata teach pendant cambia da Safety Off (sicurezza disattivata ) a Recovery Standby (Standby recupero). Toccare il pulsante di commutazione modalità imballaggio nella scheda modalità imballaggio .
-
Premere e tenere premuto il pulsante di sgancio della posa della confezione . La modalità di imballaggio del robot viene disinnestata e il robot si sposta nella posizione iniziale. Quando il robot si trova nella posizione iniziale, non si muove ulteriormente.
-
Quando il robot si trova nella posizione iniziale, toccare

-
Il display di stato del robot nella parte inferiore destra del teach pendant passa da Standby recupero a Standby Manuale. Il robot è ora in uno stato in cui l'utente può azionarlo. Premere