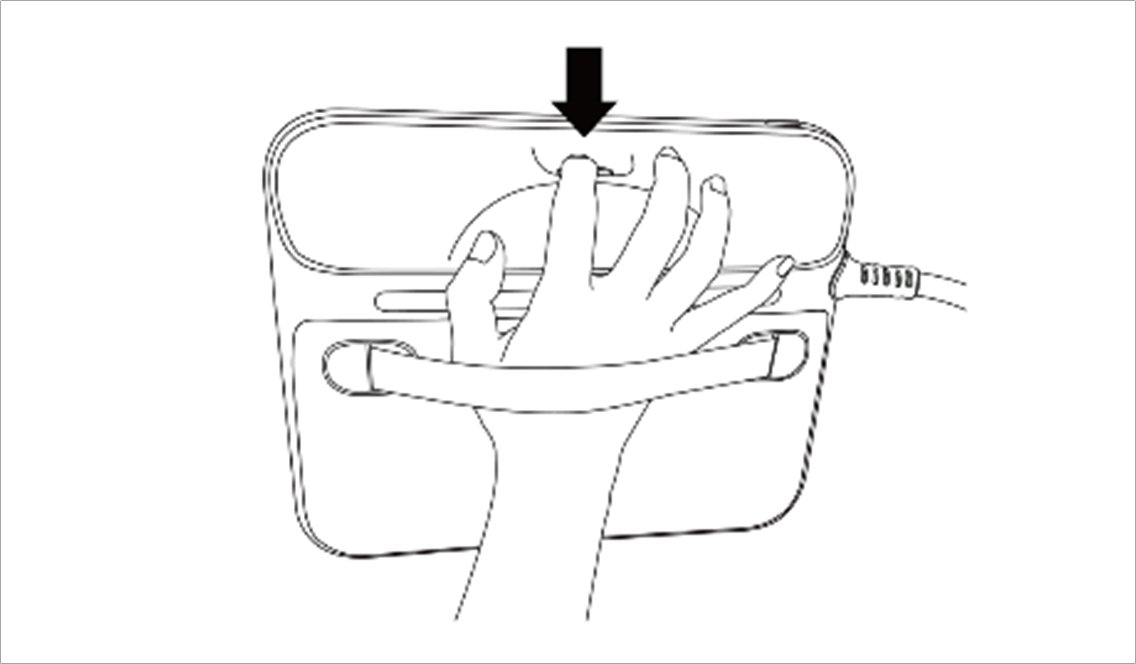
L'utente può modificare la posizione del robot tenendo premuto il pulsante di guida manuale situato sulla parte posteriore della Teach pendant (console portatile).
-
Per impostazione predefinita, il pulsante di guida manuale può essere utilizzato solo in modalità Manuale e non può essere utilizzato in modalità Automatica quando i programmi attività di Task Builder e Task Writer sono in funzione. Tuttavia, se il robot è impostato sullo stato di Pronto per guida manuale mediante il comando Guida manuale del Task Writer, il pulsante può essere utilizzato anche in modalità Automatica.