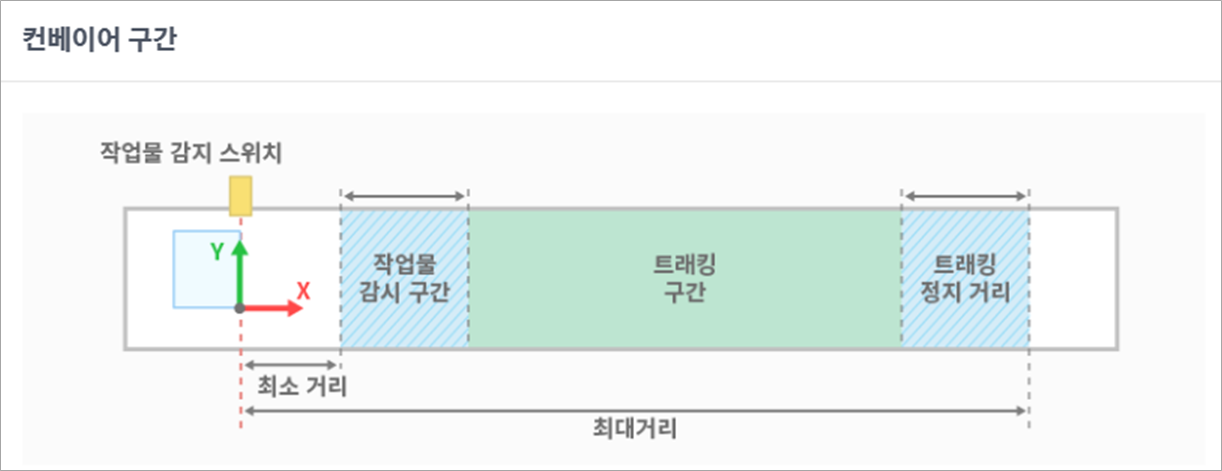
이 명령어로 움직이는 작업물 좌표계 정보를 얻습니다. 명령어 실행 시점에 작업물 감시 구간 내에 있는 작업물 중 하나의 좌표계 정보를 반환해 줍니다.
설정한 컨베이어 워크셀 아이템을 선택합니다.
컨베이어 좌표계 이름을 기입합니다. 기입한 변수에 컨베이어 좌표계 번호(121~150)를 저장합니다.
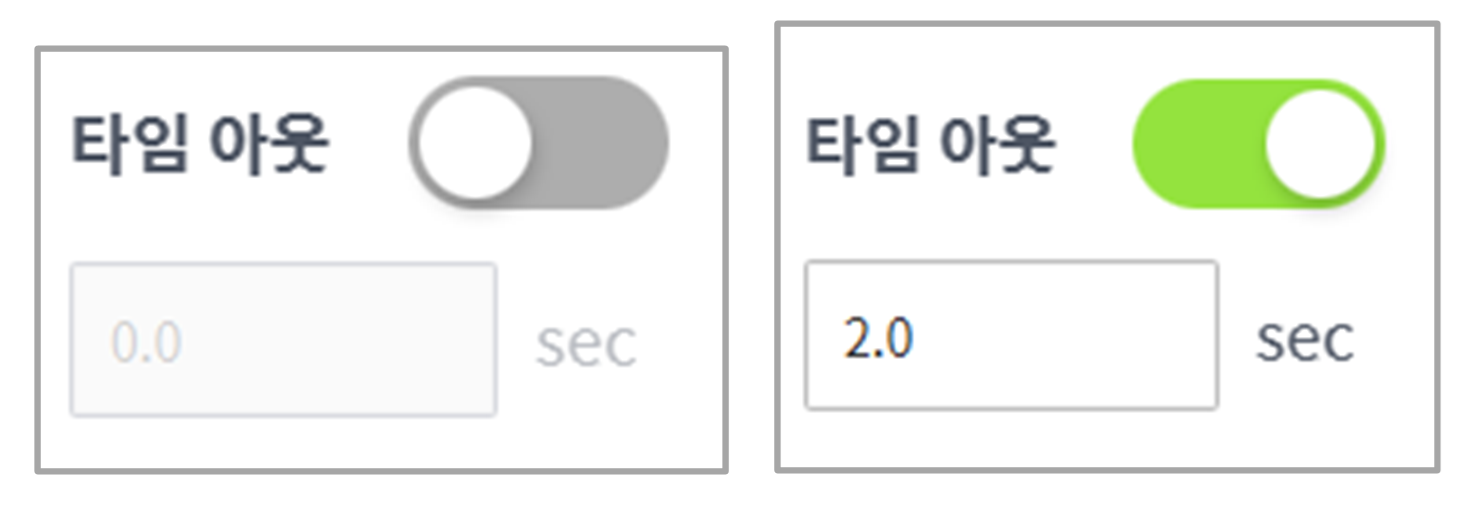
타임 아웃은 작업물 정보가 들어올 때까지 대기하는 시간을 설정합니다. Disable로 설정하거나 0으로 설정하면 작업물이 들어올 때까지 무한 대기합니다. 설정한 시간이 지나도 작업물이 들어오지 않으면 다음 프로그램 라인으로 넘어갑니다.
잡기 규칙은 작업물 대상 중에 가장 먼저 들어온 작업물부터 작업할지 나중에 들어온 작업물부터 작업할지 결정합니다. First In First Out, Last In Last Out 두 가지로 설정할 수 있습니다.
물체 오프셋 좌표는 작업물 기준 좌표계에 offset을 주고 싶을 때 활용합니다. Pose Variable은 정적인 offset을 주고 싶을 때 활용하고, 외부 센서를 이용해서 동적으로 offset을 바꿔주고 싶을 때는 Pos(x) Variable을 활용하여 프로그램에서 해당 변수에 필요 시 실시간으로 업데이트해줍니다.
