프로그램이 시작되면 자동으로 제어기에 연결을 시도합니다. 제어기에 성공적으로 연결되면 모니터링 바의 제어기 연결 상태 표시에 연결 상태가 업데이트됩니다.

연결 대상 설정하기
사용자는 실제 로봇 제어기와 시뮬레이터 중에서 연결하고자 하는 대상을 선택 할 수 있습니다.
이때 선택된 연결 대상에 따라 IP가 자동으로 설정됩니다.
-
기본 로봇 제어기 IP : 192.168.137.100
-
시뮬레이터 IP : 127.0.0.1
연결 대상 선택은 제어기(시뮬레이터)가 연결되지 않았을 때 설정 가능합니다.

제어기 연결 해제하기
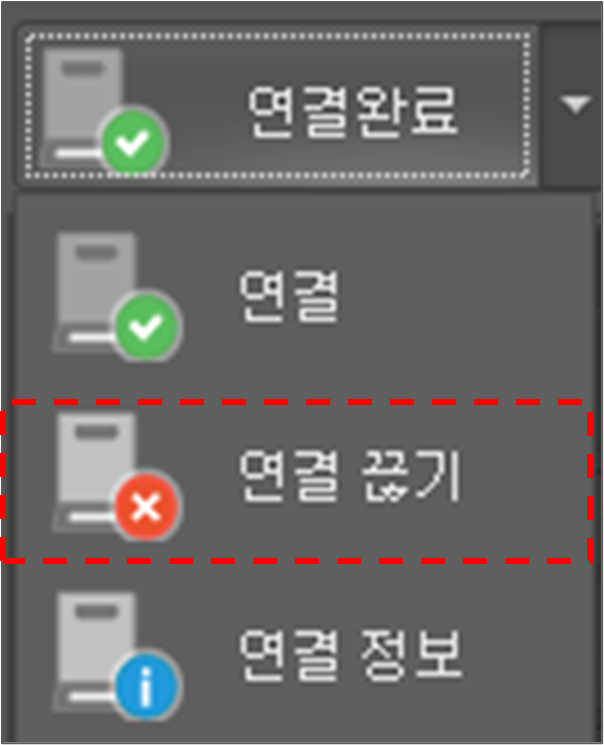
연결을 끊으려면 메인 메뉴에서 홈을 선택한 후 연결 끊기 버튼을 클릭하십시오.

-
모니터링 바에서 연결 상태를 표시하는 부분을 클릭하여 연결 끊기를 선택해 연결을 해제할 수도 있습니다.
연결을 해제한 후에는 사용자가 제어기에 직접 연결해야 합니다.
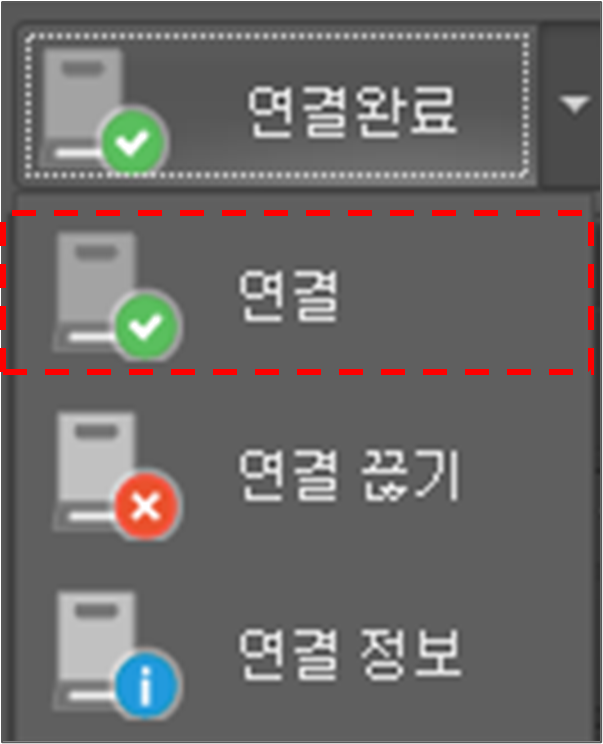
제어기에 연결하려면 메인 메뉴에서 홈을 선택한 후 연결 버튼을 클릭하십시오.

-
모니터링 바에서 연결 상태를 표시하는 부분을 클릭하여 연결을 선택해 제어기에 다시 연결할 수 있습니다.
연결 설정 변경하기
제어기의 기본 IP 주소는 192.168.137.100이기에 소프트웨어의 기본 연결 대상 주소 또한 192.168.137.100로 설정됩니다.
-
연결 설정을 변경하기 전에 제어기 연결을 해제해야 합니다.
연결 주소를 변경하려면,
-
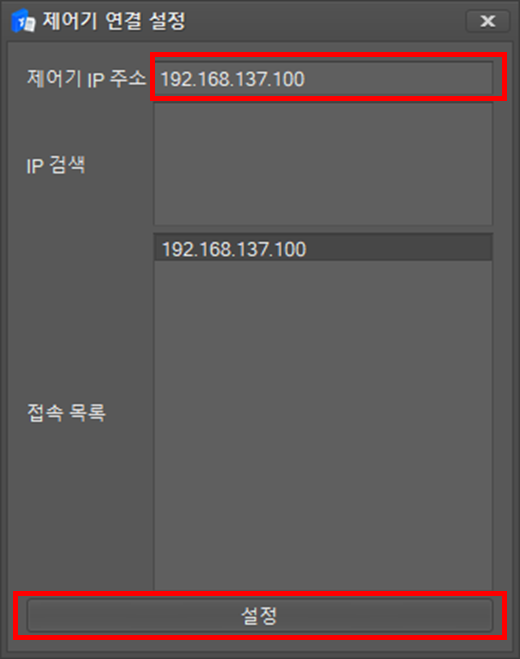
메인 메뉴에서 홈을 선택하고 연결 정보 버튼을 클릭하십시오.

-
제어기 연결 설정 창에서 IP 주소를 입력하고 설정 버튼을 클릭하십시오.