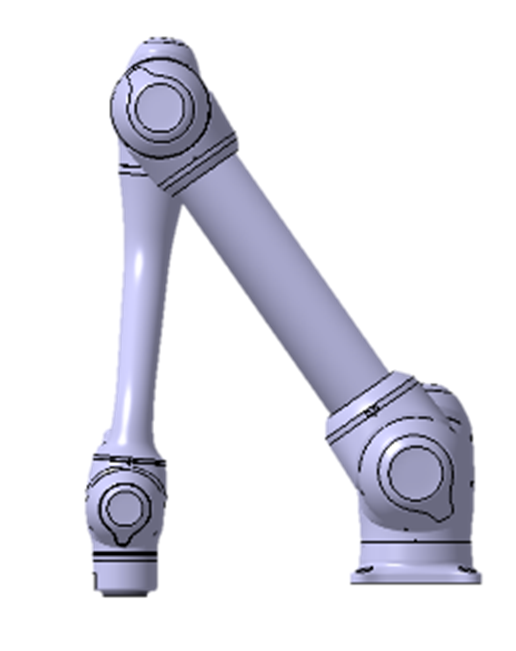
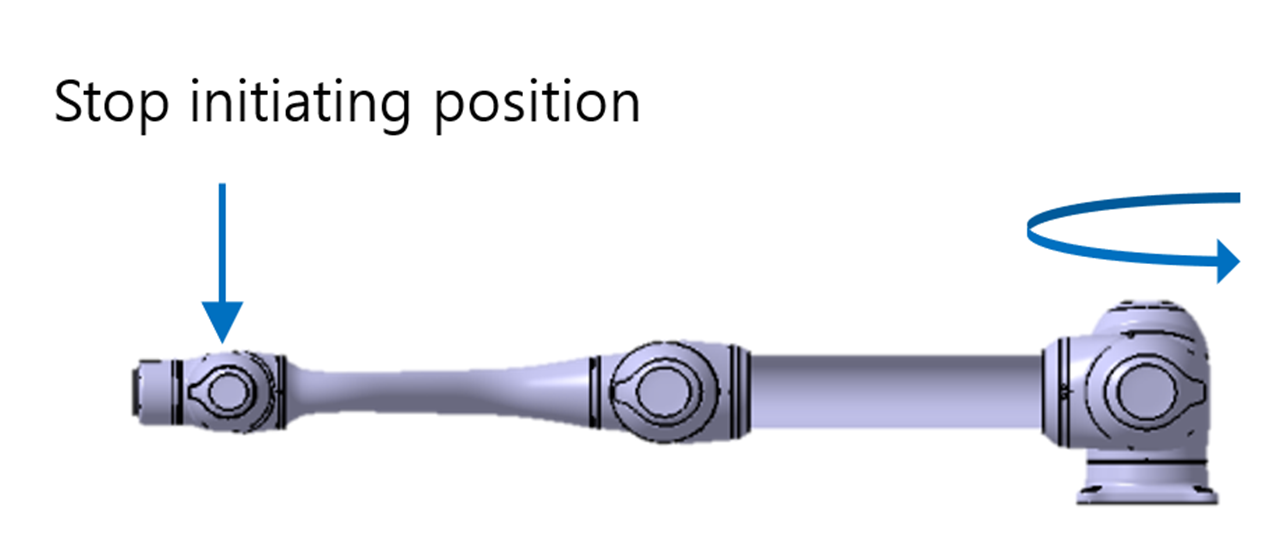
조인트 1 측정은 회전축이 지면과 수직한 상태로, 수평방향의 움직임 중에 측정되었습니다.
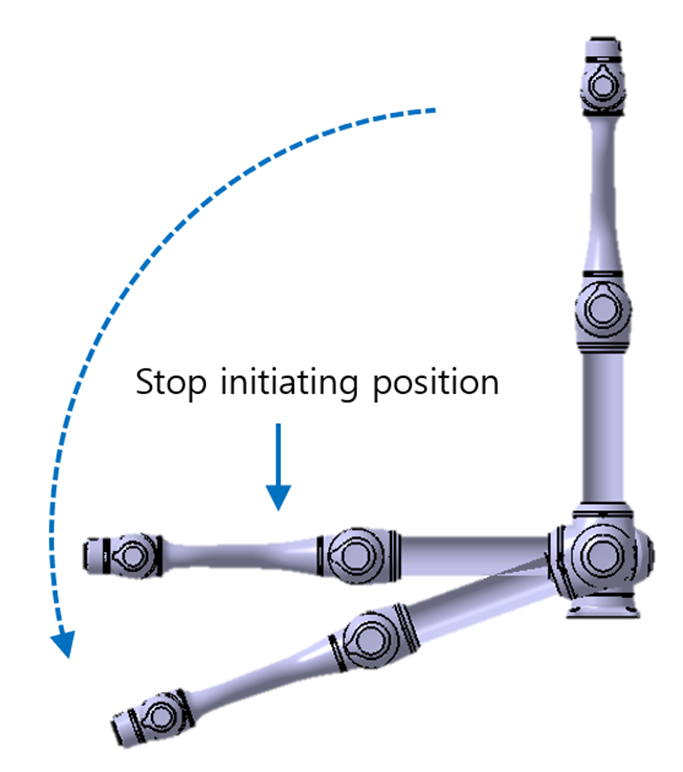
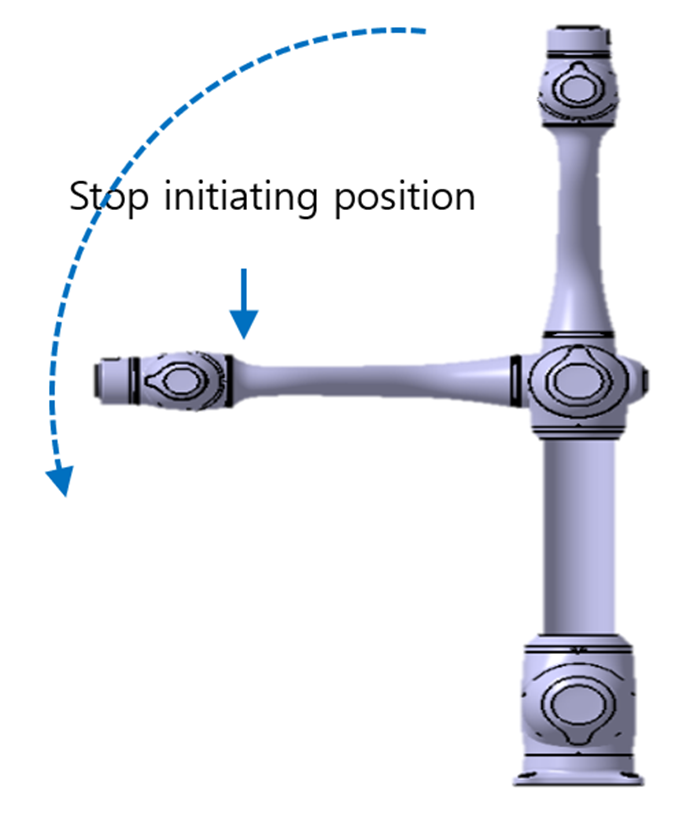
조인트 2와 조인트 3의 측정은 회전축이 지면과 평행한 상태로, 로봇이 지면과 수직한 경로를 따라 아래 방향으로 움직이는 도중 정지시켜서 측정되었습니다.
알아두기
이 측정값들은 최악의 조건에서 측정한 결과입니다. 측정 상황에 따라 달라질 수 있습니다.
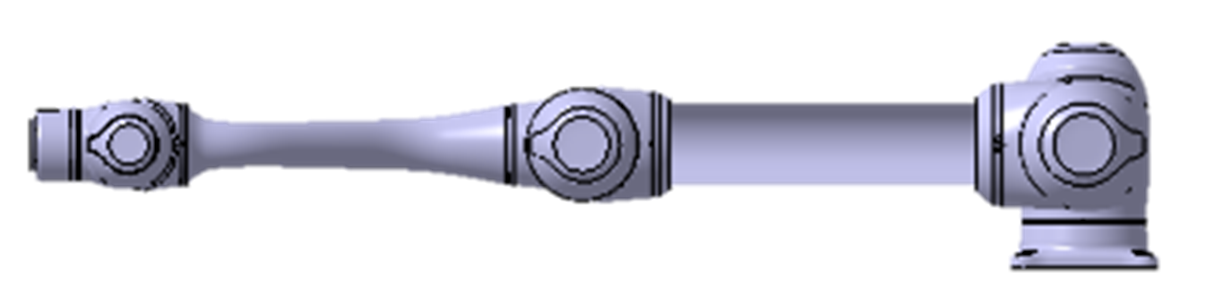
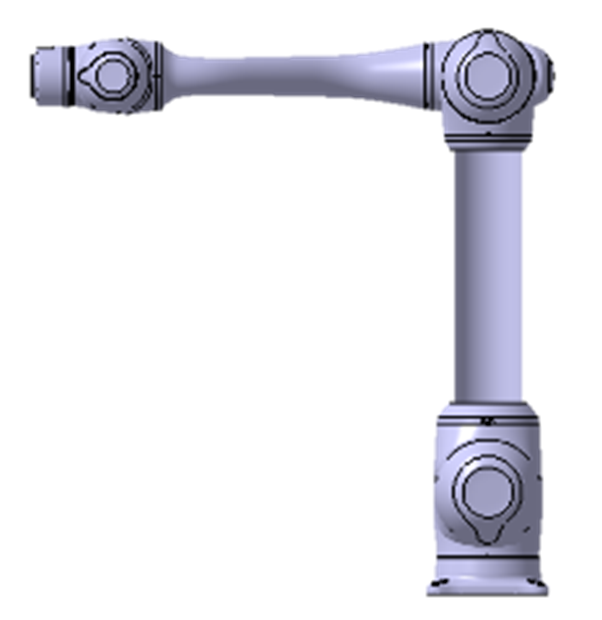
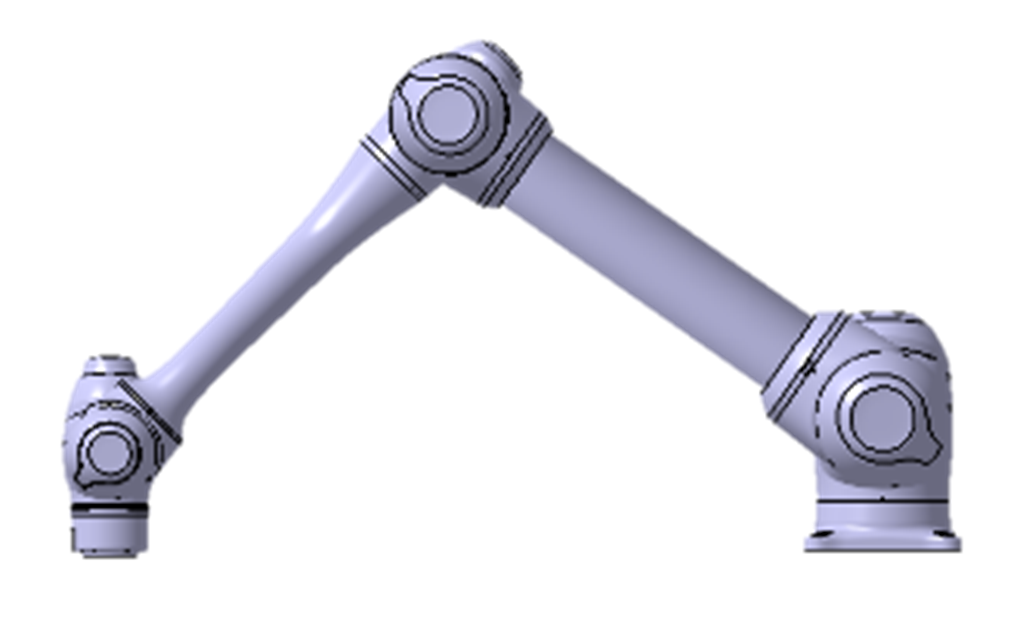
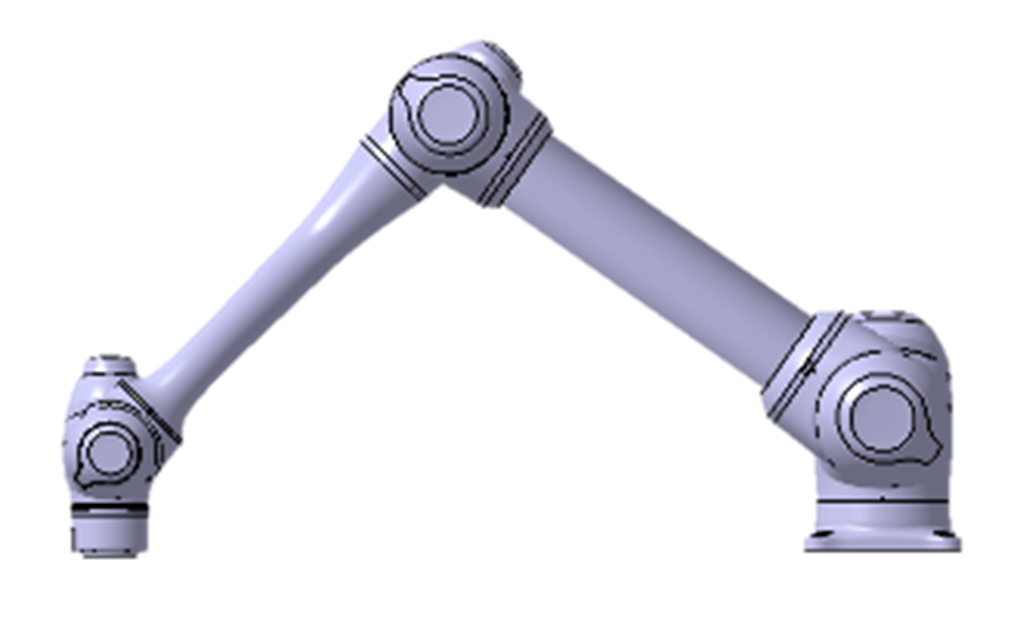
The pose for 33%, 66%, and 100% of extension
|
|
Joint 1 |
Joint 2 |
Joint 3 |
|
100% extension Stop category 0 |
|
|
|
|
33% extension Stop category 1 |

|
|
- |
|
66% extension Stop category 1 |
|
|
- |
|
100% extension Stop category 1 |
|
|
|
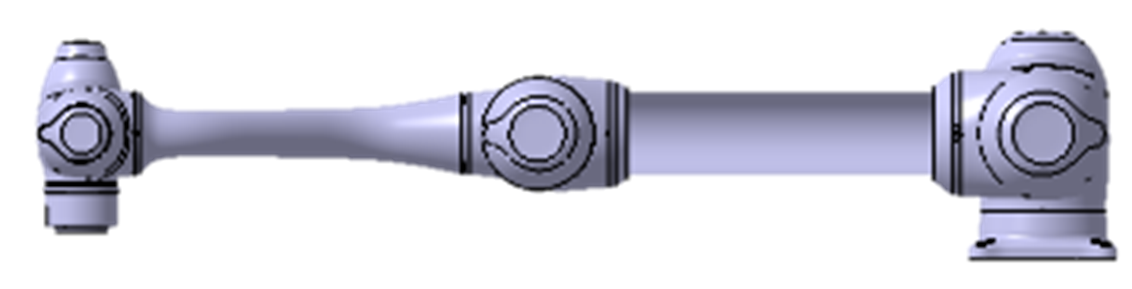
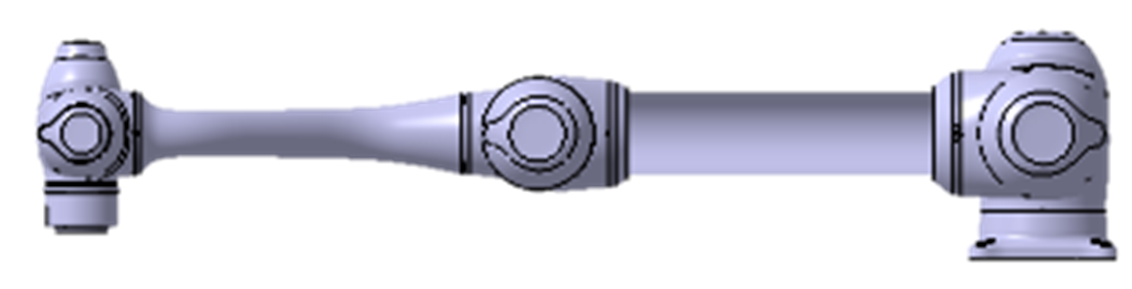
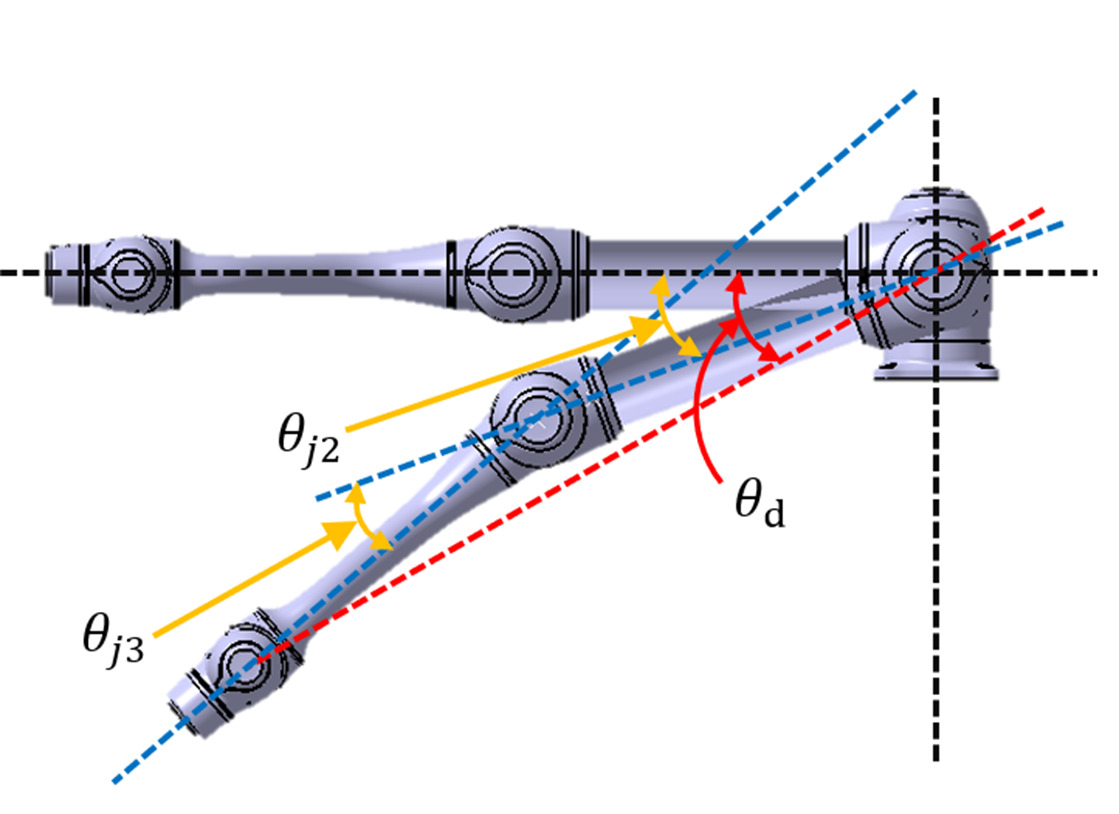
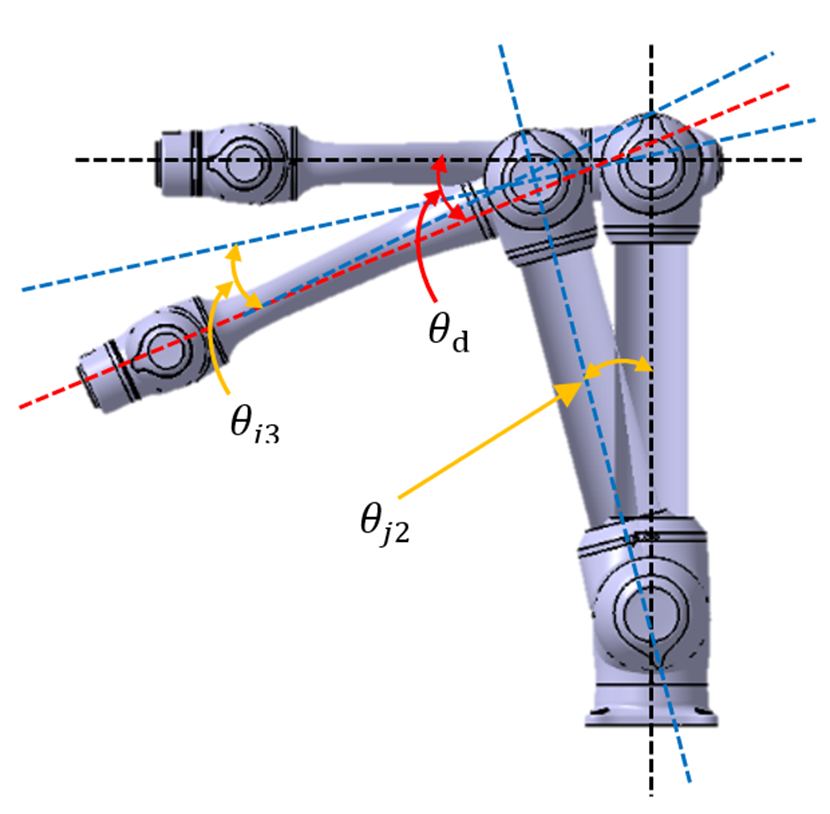
The pose when the stop is initiated and the measured angle (θd)
|
|
Pose when the stop is initiated |
Measured Angle |
|
Joint1
|
|
No slip, |
|
Joint2 |
|
|
|
Joint3 |
|
|