주의
스마트 펜던트 설정하기는 A, E Series의 옵션으로 제공되는 기능을 설정하기 위한 화면입니다.
-
설정 메뉴 영역에서 로봇 설정에 있는 스마트 펜던트 메뉴를 선택하십시오.
-
현재 설정된 정보가 설정 관리 창에 나타납니다.
-
-
스마트 펜던트 사용 토글을 ON으로 변경 하십시오.
-
스마트 펜던트 사용이 ON으로 설정되어 있는 상태에서 재시작 할 경우, 원격 제어 모드로 진입합니다.
-
-
태스크를 선택하십시오
-
스마트 펜던트 모드에서 사용할 태스크입니다.
-
-
Confirm 버튼을 클릭한 다음, Start Smart Pendant 버튼을 클릭하십시오.
-
스마트 펜던트 전용 대쉬보드 화면으로 이동하게 되면서 스마트 펜던트를 이용한 명령이 가능해지게 됩니다.
-
윈도우에서 스마트 펜던트 모드를 시작하게 되면 티치 펜던트에서도 스마트 펜던트 화면전환이 이루어지게 됩니다.
-
|
번호 |
항목 |
설명 |
|
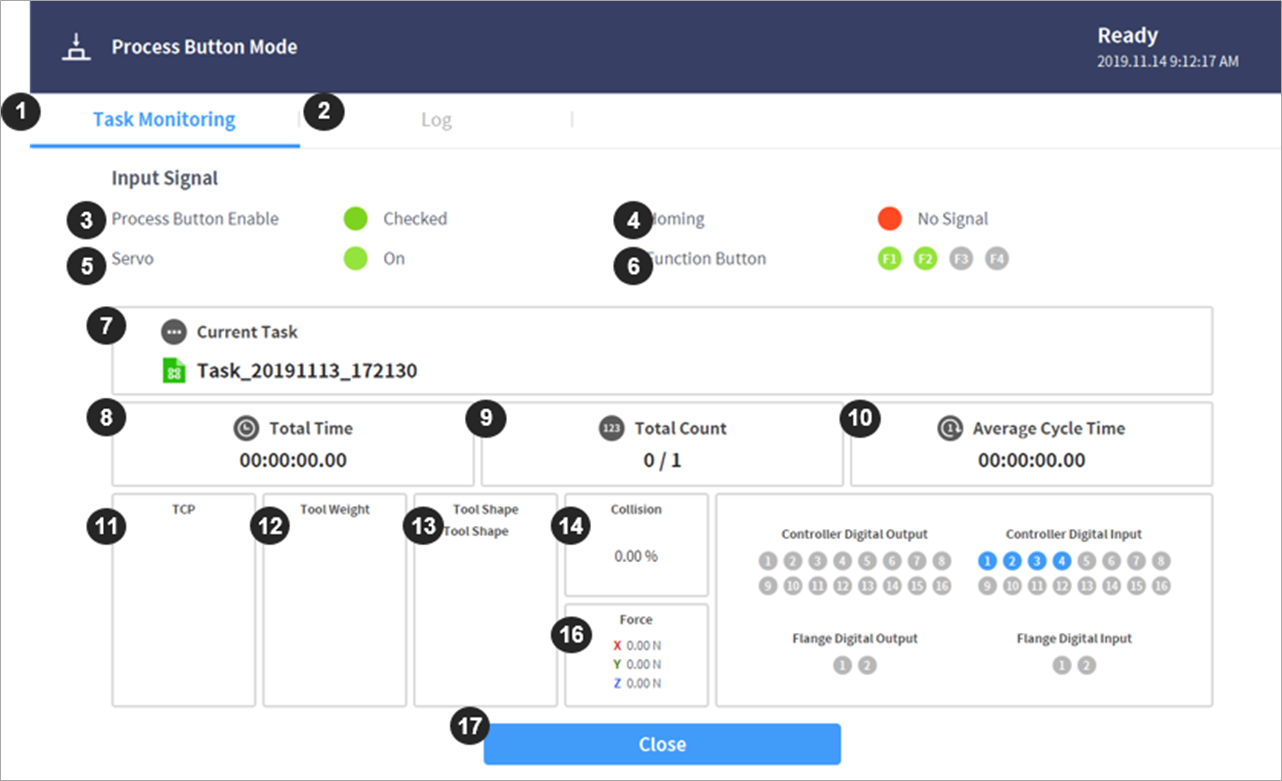
1 |
Task Monitoring 탭 |
스마트 펜던트의 입력 신호와 Task 실행 시 필요한 모니터링 정보를 표시하는 탭 |
|
2 |
Log 탭 |
태스크 실행 중 수집된 로그 메시지를 표시하는 탭 |
|
3 |
Smart Pendant Enable 신호 |
스마트 펜던트가 컨트롤러에 정상적으로 연결되면, Checked(초록색)으로 표시됨. |
|
4 |
Homming 신호 |
스마트 펜던트의 homming 버튼을 누르면 표시등이 Checked(초록색)로 표시됨 |
|
5 |
Servo On/Off 신호 |
Servo On/Off 상태를 표시해줌. |
|
6 |
Function Button 신호 |
P1~P4 누름 상태 표시등. |
|
7 |
Current Task |
스마트 펜던트에서 사용할 태스크를 표시한 부분 |
|
8 |
Total Time |
총 Task 플레이 타임 |
|
9 |
Total Count |
Task 루프된 카운트 |
|
10 |
Average Cycle Time |
태스크 회차별 평균 플레이 시간 |
|
11 |
TCP 표시등 |
현재 태스크에서 사용중인 TCP 정보 |
|
12 |
Tool Weight 표시등 |
현재 사용중인 Tool Weight 정보 |
|
13 |
Tool Shape 표시등 |
현재 사용중인 Tool Shape 정보 |
|
14 |
Collision |
Collision 임계치 정보 |
|
15 |
Force |
Force 정보 |
|
16 |
Digital / Flange IO |
Digital/Flange IO 정보 |
|
17 |
Close |
스마트 펜던트 모드를 종료하기 위한 버튼. |
알아두기
스마트 펜던트 모드에서 비상 정지(Emergency Stop) 또는 보호 정지(Protective Stop)가 발생하면 다음과 같이 처리됩니다.
-
비상 정지: 비상 정지 팝업이 표시됩니다. 비상정지의 원인을 제거한 후 비상정지 스위치를 당기거나 돌려서 리셋하면 팝업이 자동으로 닫힙니다.
-
Servo Off 상태로 전환시키는 보호 정지: 빨간색 보호 정지 팝업창이 표시됩니다. 보호 정지의 원인을 제거한 후 스마트 펜던트의 Servo On 버튼을 누르면, 로봇 서보 드라이브가 켜지고 팝업창이 자동으로 닫힙니다.
-
Interrupted 상태로 전환시키는 보호 정지: 노란색 보호 정지 팝업창이 표시됩니다. 보호 정지의 원인을 제거한 후 스마트 펜던트의 Reset 버튼을 누르면 로봇 상태가 수동 대기(Manual Standby), 자동 대기(Auto Standby), HGC 대기(HGC standby) 중 하나의 정상 대기 상태로 전환됩니다. 로봇을 움직이지 않고는 원인을 제거할 수 없는 안전 위반의 경우 콕피트를 활용한 협착 탈출기능 (Clamping Escape by Cockpit)을 사용할 수 있습니다.
-
자세한 내용은 모드별 상태와 플랜지 LED 색상에서 확인할 수 있습니다.