각 부 명칭과 기능
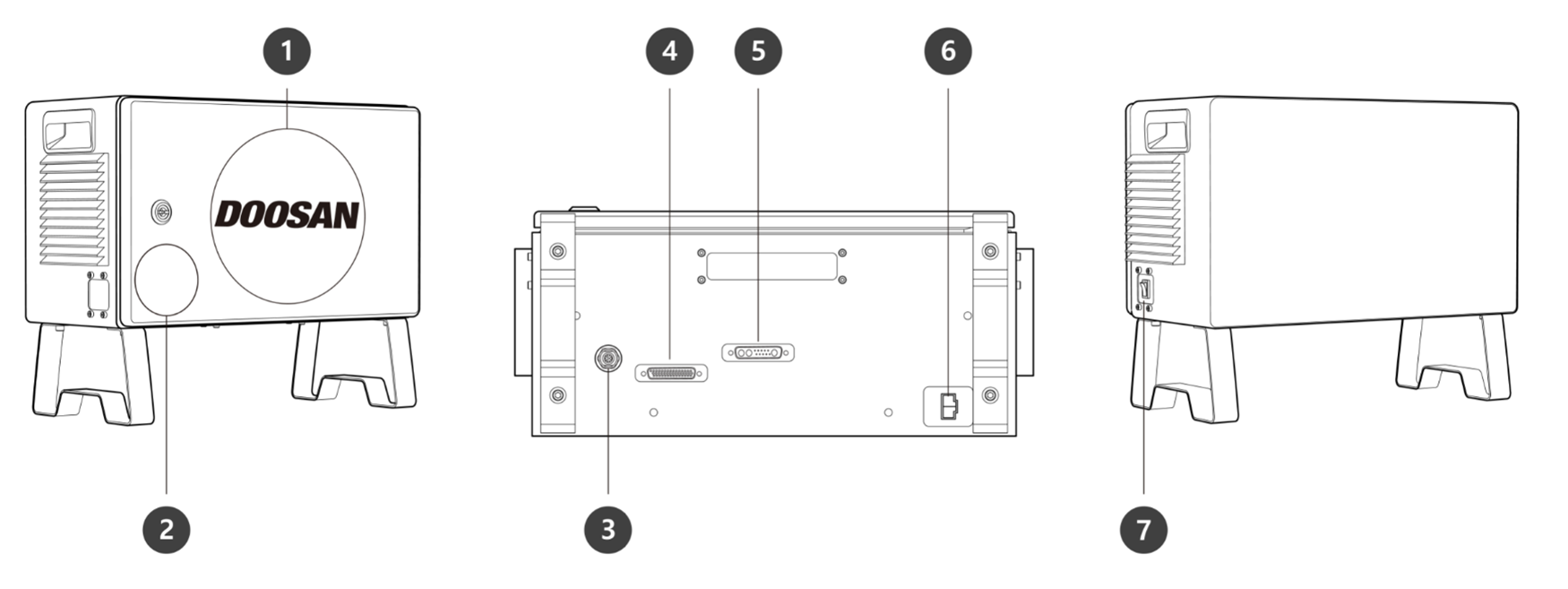
DC 컨트롤러 (CS-04)
|
번호 |
항목 |
설명 |
|---|---|---|
|
1 |
I/O 연결 단자(내부) |
다른 로봇의 컨트롤러나 주변 기기와 연결할 수 있습니다. |
|
2 |
비상 정지버튼 설정스위치 |
티치펜던트, 스마트 펜던트 또는 비상 정지버튼 사용을 위해 반드시 스위치를 실제 구성에 맞게 설정해야 합니다. |
|
3 |
비상 정지버튼 및 스마트 펜던트 연결단자 |
비상정지 버튼 또는 스마트 펜던트의 케이블을 컨트롤러와 연결합니다. |
|
4 |
티치펜던트 케이블 연결단자 |
티치펜던트의 케이블을 컨트롤러와 연결합니다. |
|
5 |
매니퓰레이터 케이블 연결 단자 |
매니퓰레이터의 케이블을 컨트롤러와 연결합니다. |
|
6 |
전원 연결 단자 |
컨트롤러의 전원을 연결합니다. |
|
7 |
전원 스위치 |
컨트롤러의 주 전원을 켜거나 끌 수 있습니다. |
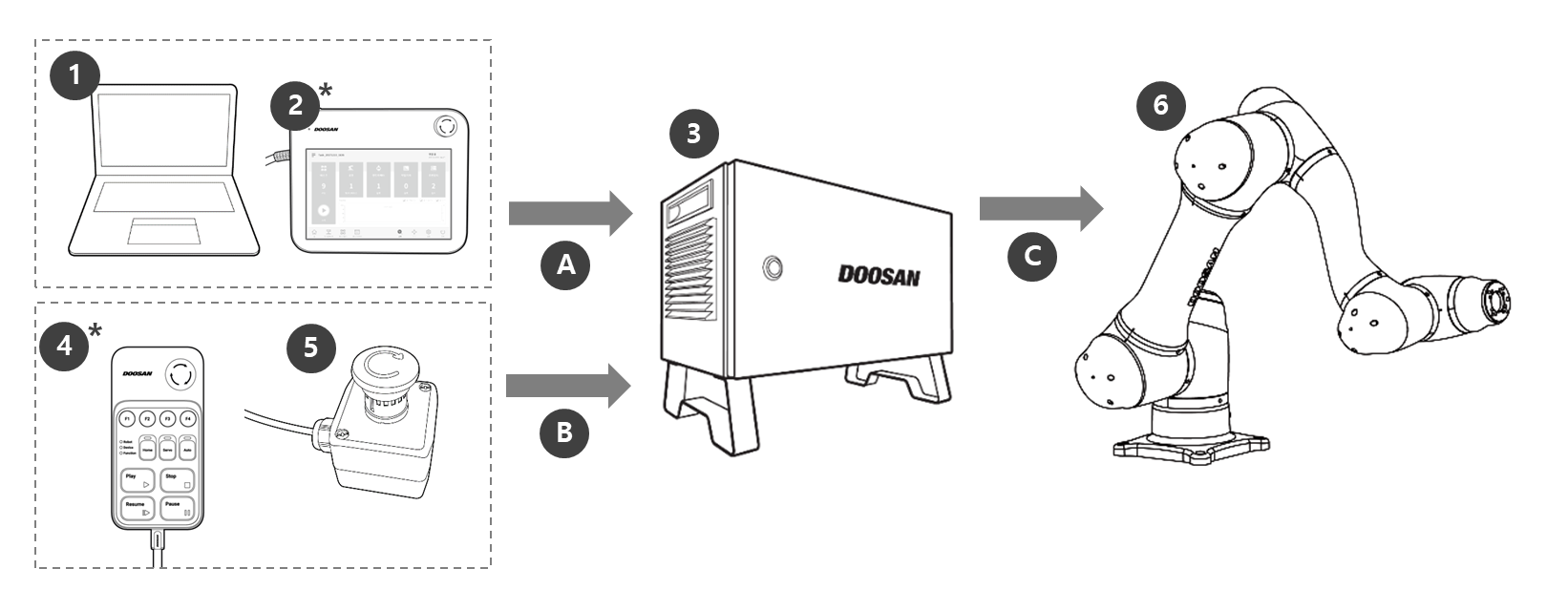
시스템 구성도
|
번호 |
이름 |
설명 |
|---|---|---|
|
1 |
랩탑 |
DART Platform를 설치 후 티치펜던트와 동일한 작업환경 구성이 가능합니다. 랩탑은 구성품에 미 포함이며, DART Platform를 설치하여 사용하실 때 필요합니다. |
|
2 |
티치펜던트** |
시스템 전체를 관리하는 기기로 로봇에게 특정 자세를 학습시키거나 매니퓰레이터와 컨트롤러 및 매니퓰레이터에 설치되는 관련된 설정을 할 수 있습니다. |
|
3 |
컨트롤러* |
티치펜던트에서 설정한 자세나 움직임에 따라 로봇의 움직임을 조정합니다. 다양한 입출력 포트를 갖추고 있어 다양한 장비 및 장치를 연결하여 사용할 수 있습니다. |
|
4 |
스마트 펜던트** |
서보 온/오프나 기 설정된 프로그램의 실행/종료 등 간단한 기능 수행이 가능한 펜던트로 로봇을 쉽게 컨트롤 할 수 있습니다. |
|
5 |
비상정지 버튼* |
기본 구성품으로 랩탑 사용시, 티치펜던트의 비상정지 버튼 역할을 합니다. |
|
6 |
매니퓰레이터* |
물체를 운반하거나 부품을 조립하는데 사용할 수 있는 산업용 협동 로봇으로 다양한 툴을 부착하여 사용할 수 있습니다. |
|
A |
명령/모니터링 |
|
|
B |
명령 |
|
|
C |
전원/네트워크 |
|
-
기본구성품(*)과 옵션품(**, 별도 구매)으로 구분
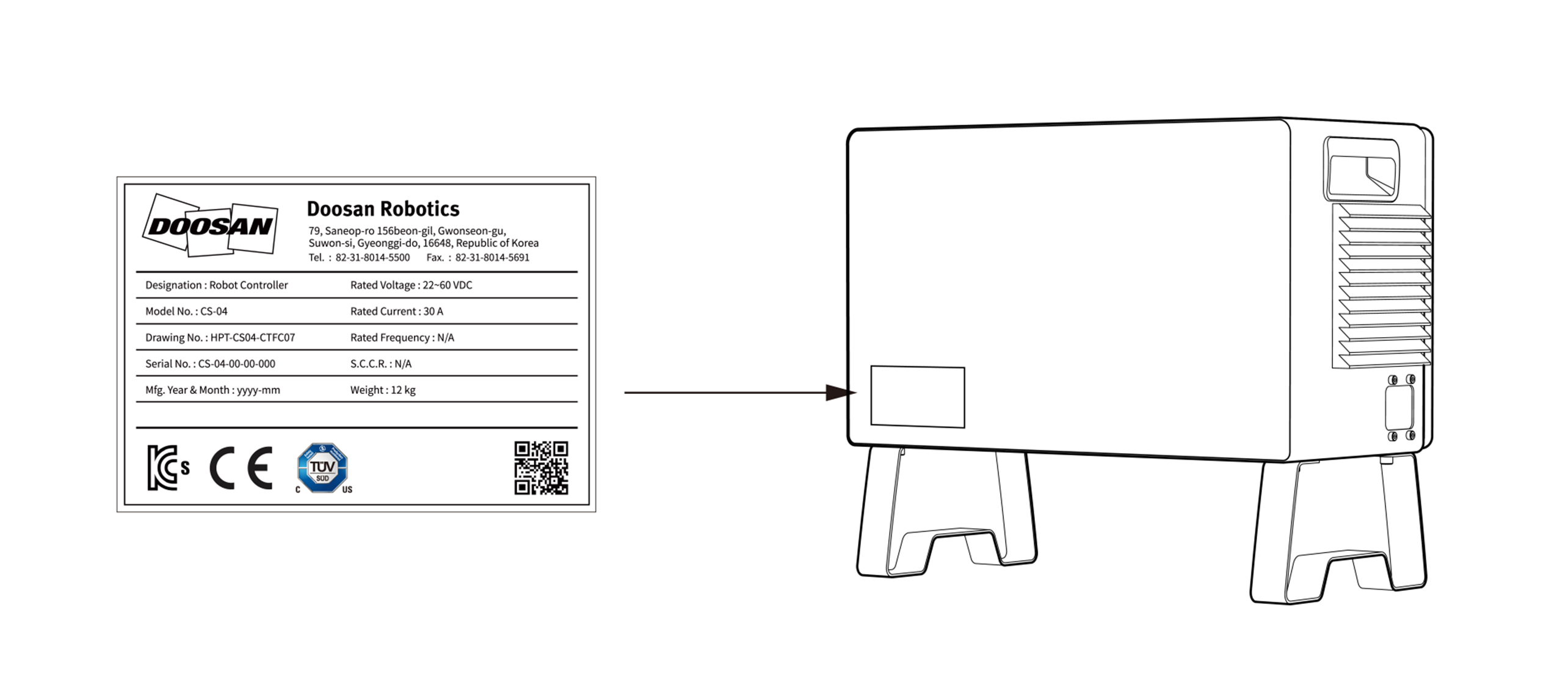
명판과 라벨