可选 正常 20 分钟

此示例在任务编写器中创建。此示例在任务构建器中的尝试方式几乎相同。
小心
-
在尝试样本之前,请确保阅读并遵循 (2.12-zh_CN) 使用注意事项。有关详细信息,请参阅 (2.12-zh_CN) 第 1 部分 .安全手册。
注
-
如果启用或禁用柔量控制时外部扭矩高于阈值,机器人会因 JTS(关节扭矩传感器)错误而停止程序。
Threshold of JTS error (Nm)
Model
J1
J2
J3
J4
J5
J6
A0509
15
15
15
15
15
15
A0912
18
18
15
15
15
15
-
无论外部扭矩大小如何,都可以执行刚度更改。
-
在合规性控制期间,不能执行诸如 MoveJ 命令等联合动作。
-
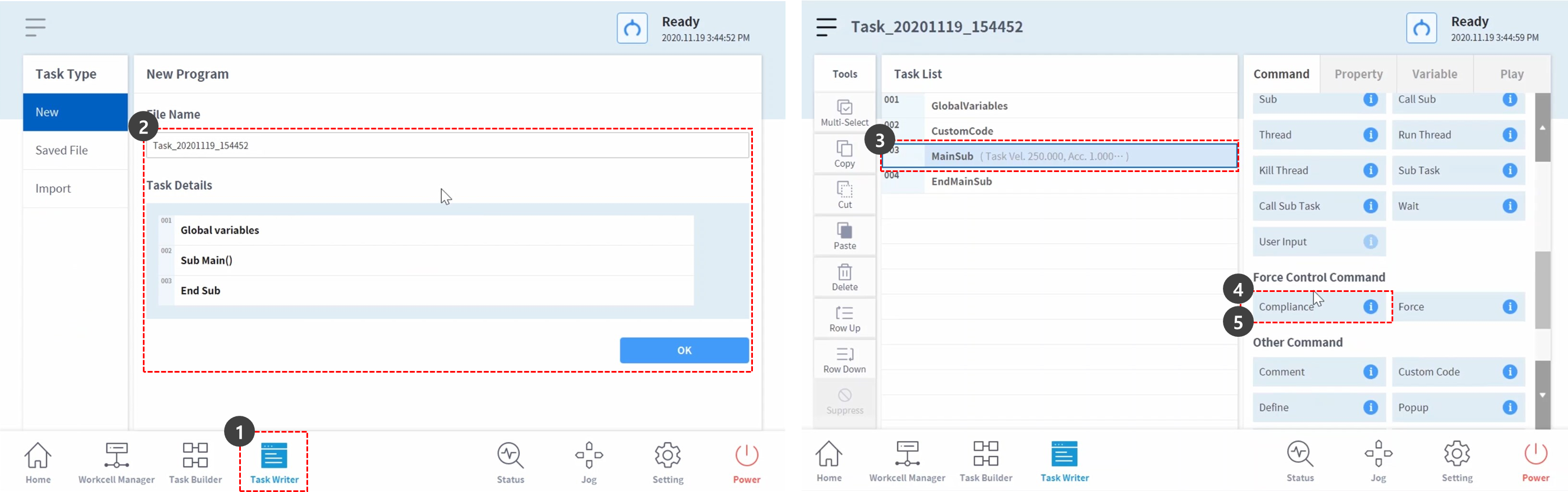
从底部菜单中选择任务编写器。
-
输入任务名称,然后按“ OK ”按钮。
-
从任务列表的第三行选择 MainSub 命令 。新命令将添加到所选行的下一行。
-
添加合规性命令。此命令计划用于启用合规性控制。
-
添加另一个合规性控制。此命令计划用于禁用合规性控制。
-
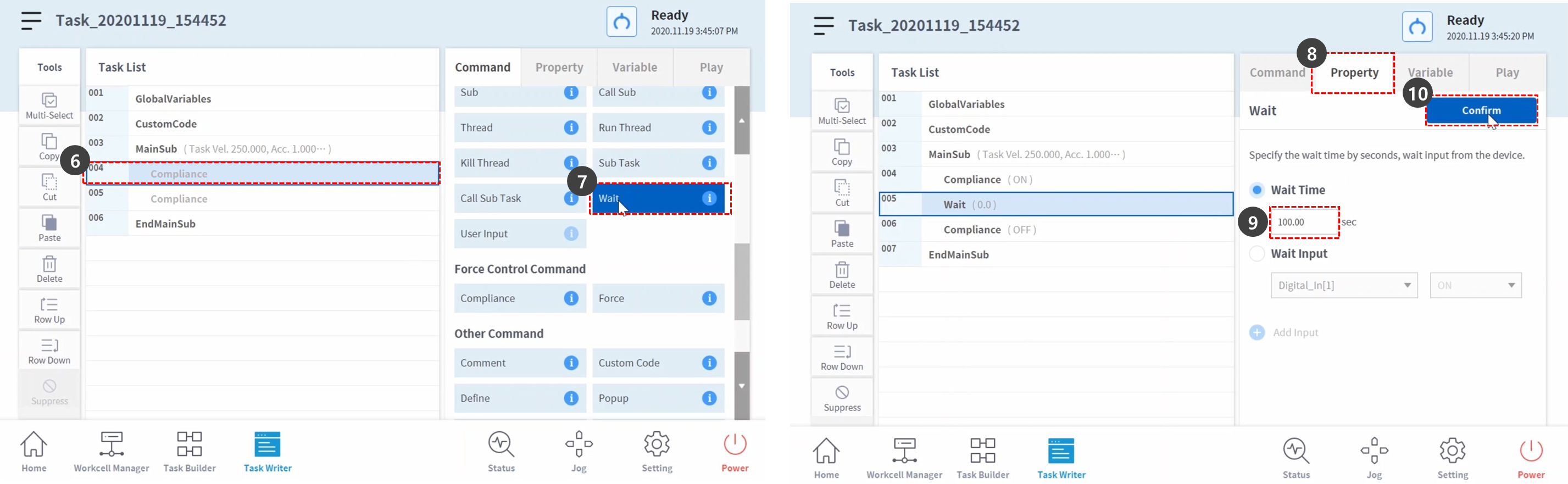
在第四行选择合规性命令。新命令将添加到所选行的下一行。
-
添加等待命令。
-
选择属性选项卡。
-
将等待时间设置为:
-
等待时间:100 秒
-
-
按确认按钮。
-
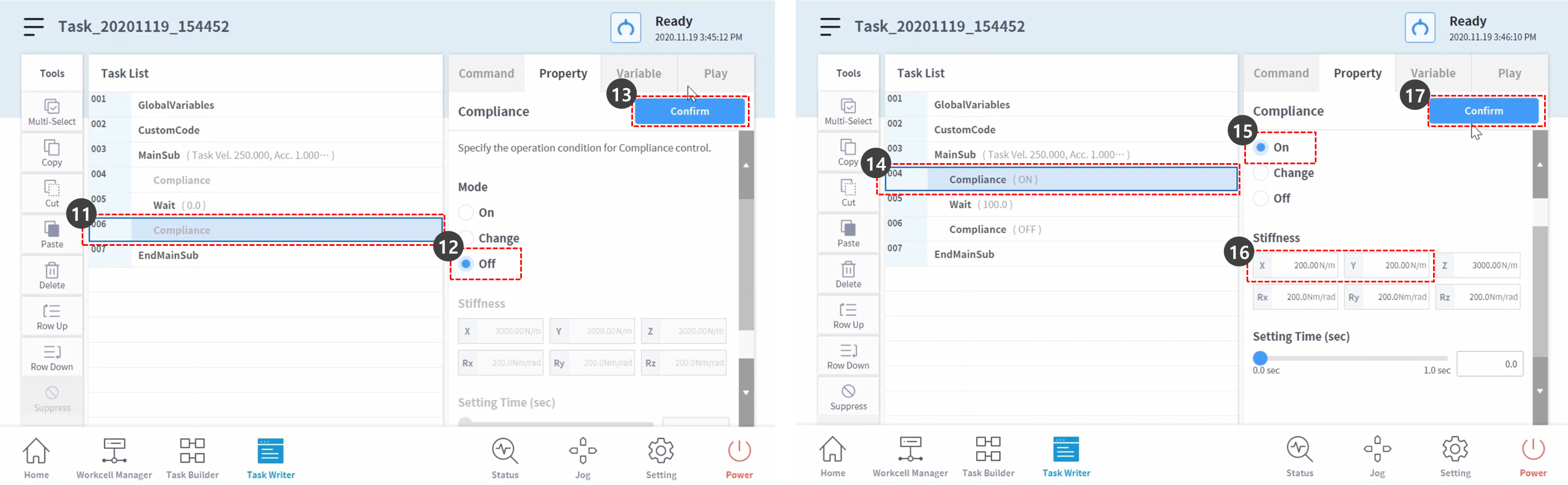
在第六行选择“ Compliance Command ”。
-
将属性中的模式设置为:模式关闭禁用合规性控制。
-
模式:关
-
-
按确认按钮。
-
在第四行选择合规性命令。
-
将属性中的“模式”设置为以下值:模式打开启用合规性控制。
-
模式:开
-
-
将刚度设为以下值:降低 X 和 Y 方向的刚度,以使 X 和 Y 方向的反应更柔和。
-
X :200 牛 / 米
-
Y :200 牛 / 米
-
Z :3000 N/m (默认)
-
Rx , ry , Rz :200 牛米 / 半径 (默认)
-
-
按确认按钮。
-
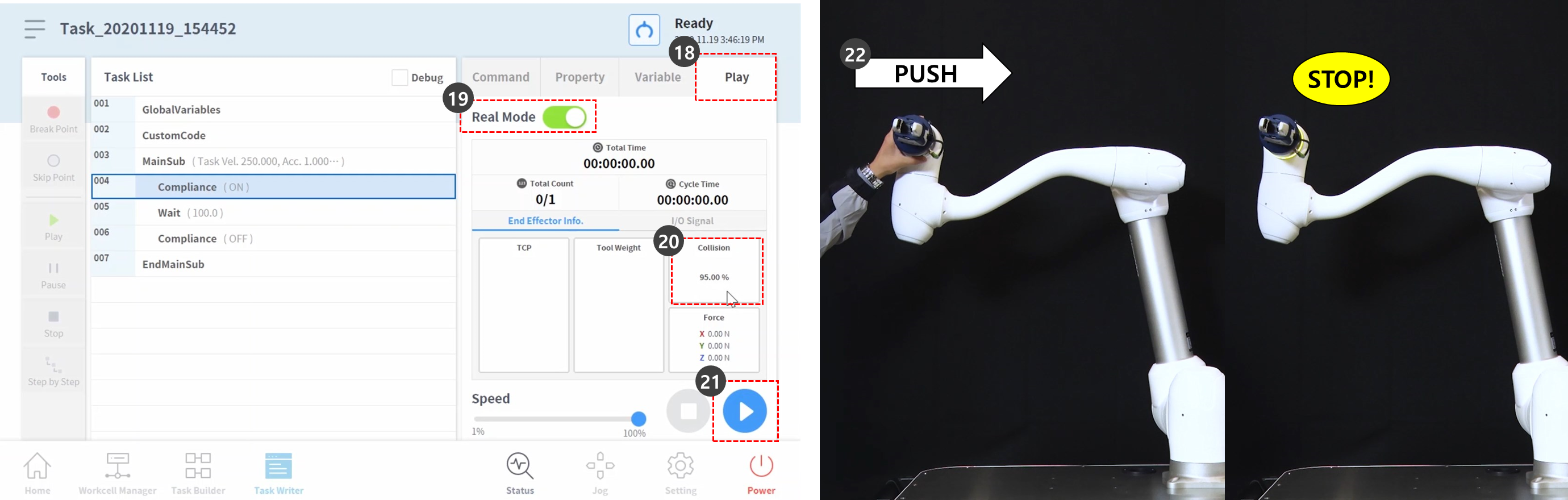
选择播放选项卡。
-
启用 Real Mode 切换按钮。
-
启用切换按钮后,按钮将呈绿色亮起。
-
-
此样本将故意激活安全停止,以解释在合规性控制期间降低碰撞灵敏度的原因。该样本的碰撞灵敏度为 95%。如果碰撞灵敏度如此之高,机械手会非常敏感地对碰撞做出反应。
-
碰撞时,机械手被安全挡块停止。
-
-
按播放按钮。
-
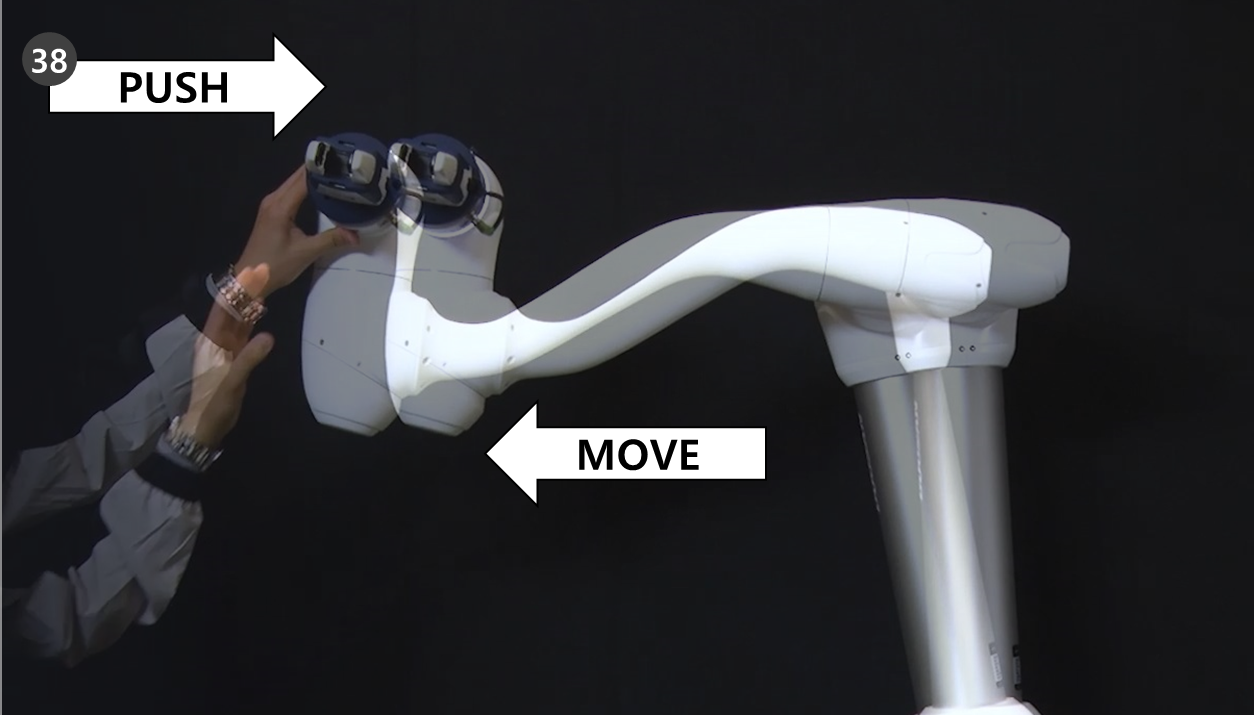
握住机械手末端,然后沿机械手主体方向缓慢推。机械手由于碰撞错误而停止。在碰撞导致安全停止期间,机械手 LED 指示灯呈黄色亮起。
-
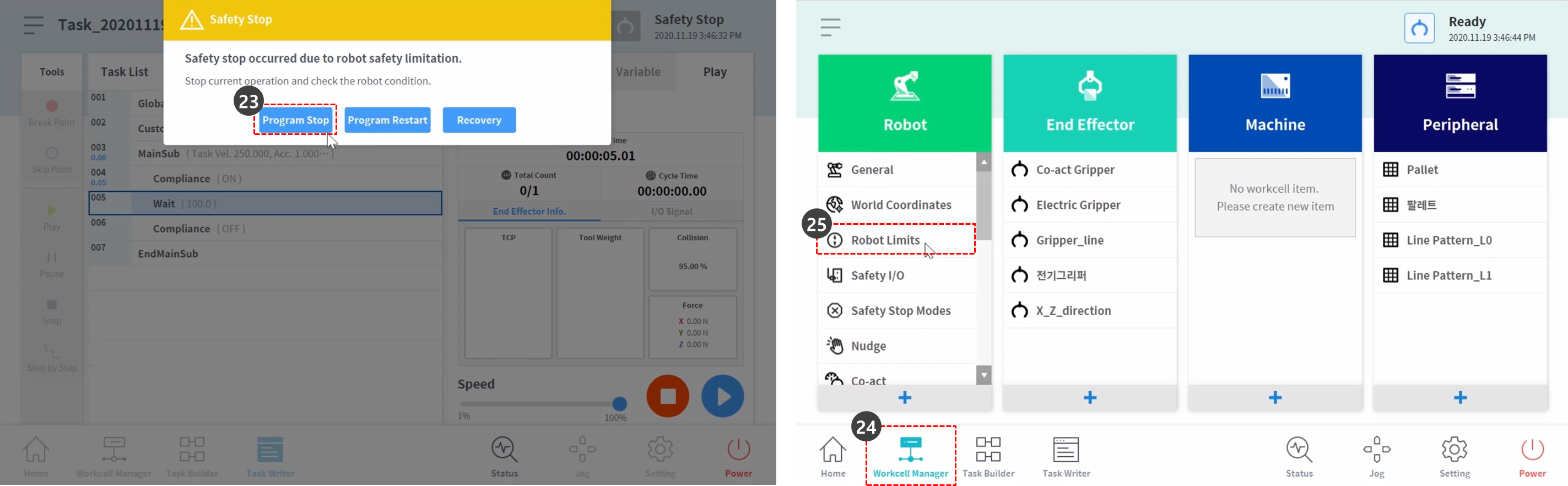
按下屏幕上黄色安全停止警告窗口中的程序停止按钮。正在进行的任务程序已停止。
-
从底部菜单中选择工作单元管理器。
-
选择机械手 > 机械手限值。
-
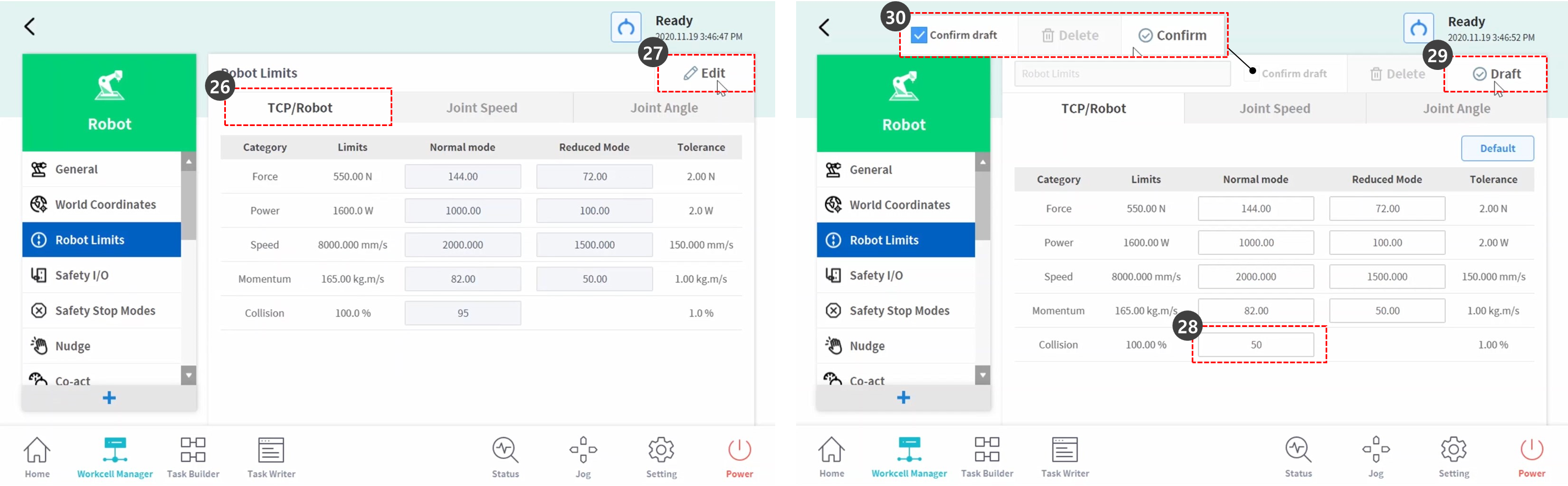
选择“ TCP/IP 机械手”选项卡。
-
按编辑按钮。
-
将碰撞灵敏度设置为以下值:
-
正常模式:50%
-
-
按下拔模按钮。
-
选中“ Confirm Draft (确认草稿) ”复选框,然后按“ Confirm (确认) ”按钮。
-
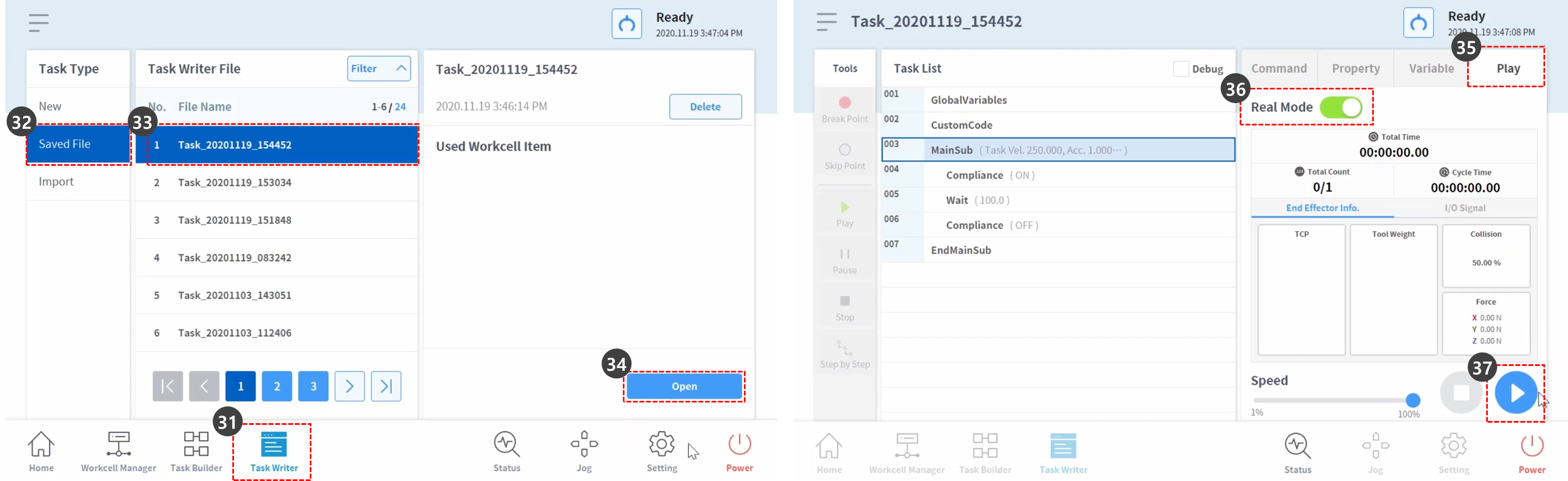
从底部菜单中选择任务编写器。
-
在屏幕左侧选择已保存的文件。
-
选择之前,请检查第一个任务文件名是否是步骤 2 中的任务名。上次保存的任务位于任务编写器文件列表的顶部。
-
按“ Open (打开) ”按钮。
-
选择播放选项卡。
-
启用 Real Mode 切换按钮。
-
按播放按钮。
-
握住机械手末端,然后沿机械手主体方向缓慢推。机械手由于推力而移动,并返回到原始位置。