名称和功能
直流控制器 (CS-04)
|
编号 |
项 |
说明 |
|
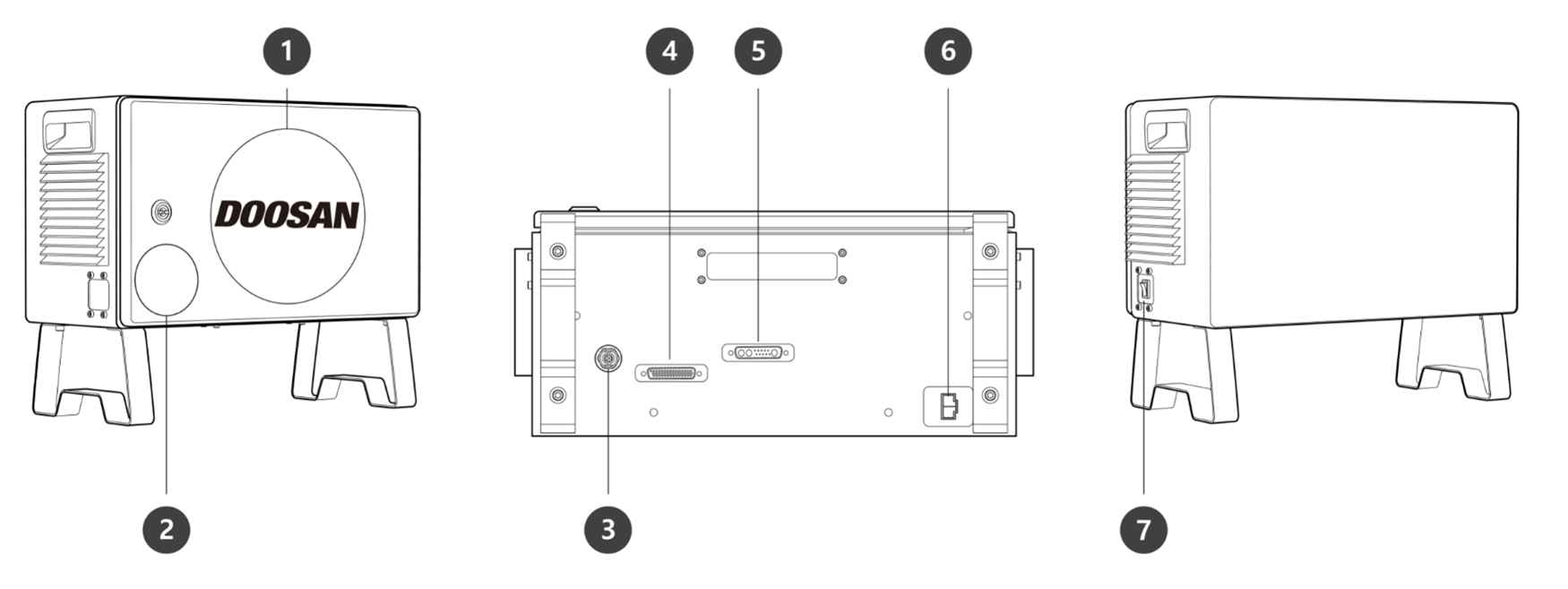
1 |
I/O connection terminal (internal) |
无法连接其他机器人或周围设备的控制器。 |
|
2 |
Emergency Stop Button Setting switch |
必须根据实际组成来设置开关,以方便使用智能示教器或紧急停止按钮。 |
|
3 |
Emergency stop button and Smart Pendant connection terminal |
这会将紧急停止按钮或智能示教器电缆连接到控制器。 |
|
4 |
Teach Pendant cable connection terminal |
这会将示教器电缆连接到控制器。 |
|
5 |
Manipulator cable connection terminal |
这会将操纵器的电缆连接到控制器。 |
|
6 |
Power connection terminal |
这将电源连接到控制器。 |
|
7 |
Power switch |
这将打开/关闭控制器的主电源。 |
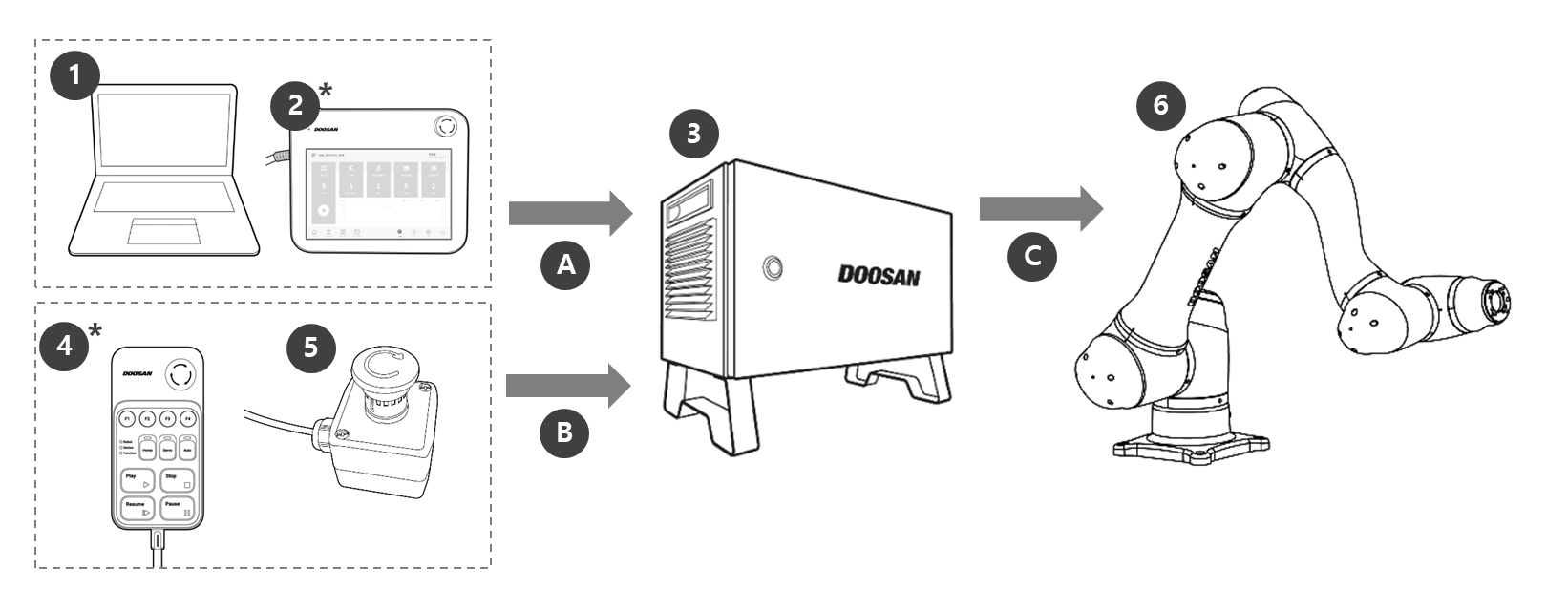
系统配置
|
编号 |
项目 |
说明 |
|---|---|---|
|
1 |
笔记本电脑 |
安装 DART Platform 后,可设置与示教器相同的工作环境。 笔记本电脑不包含在包装中,而安装 DART Platform 时必须使用笔记本电脑。 |
|
2 |
示教器** |
该装置用于管理整个系统,并且能够向操纵器示教特定位姿以及设置与控制 器和机器人安装相关的操纵器和产品。
|
|
3 |
控制器* |
用于根据示教器设置的位姿或运动控制机器人的运动。控制箱具备各种 I/O 端口,可连接和使用各种设备和装置。 |
|
4 |
智能示教器** |
机器人可通过能够执行简单功能(如伺服开/关或执行/关闭预设程序)的示教器进行控制。
|
|
5 |
紧急停止按钮* |
如果将笔记本电脑用作系统的组成部分,其将充当示教器的紧急停止按钮。 |
|
6 |
操纵器* |
一种工业协作机器人,可以使用各种工具执行运输或组装任务。 |
|
A |
Command/
|
|
|
B |
Command |
|
|
C |
Power Supply/
|
|
-
产品标识为标准产品 (*) 和选配产品(**,单独出售)
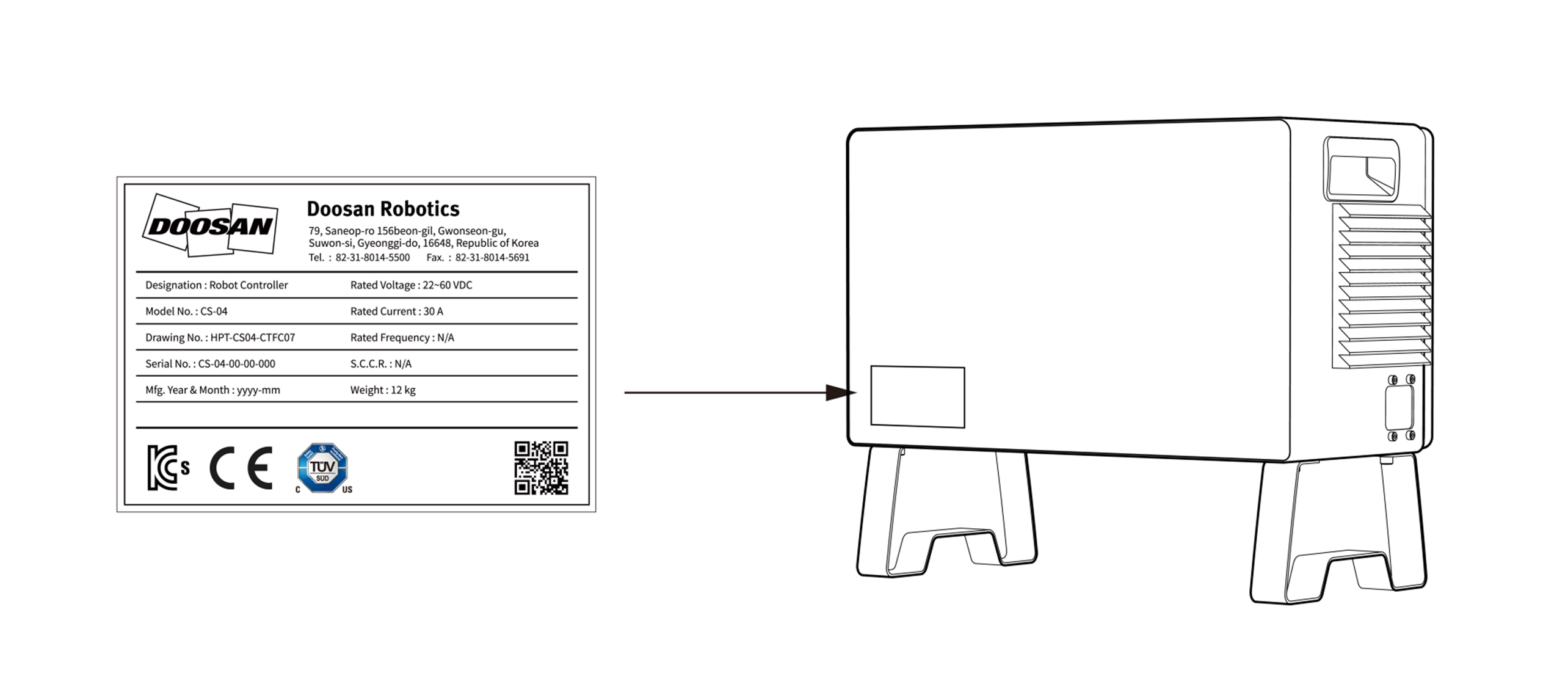
铭牌和标签