Pomocí šroubů M8 připevněte manipulátoru do čtyř 9,5mm otvorů na základně manipulátoru.
-
Pro dotažení šroubů se doporučuje použít utahovací moment 20 Nm.
Použijte také podložku (plochou nebo spirálovou), aby se předešlo uvolnění spoje v důsledku vibrací.
-
K přesné instalaci manipulátoru na pevném místě použijte přesný značkovací kolík Φ5.
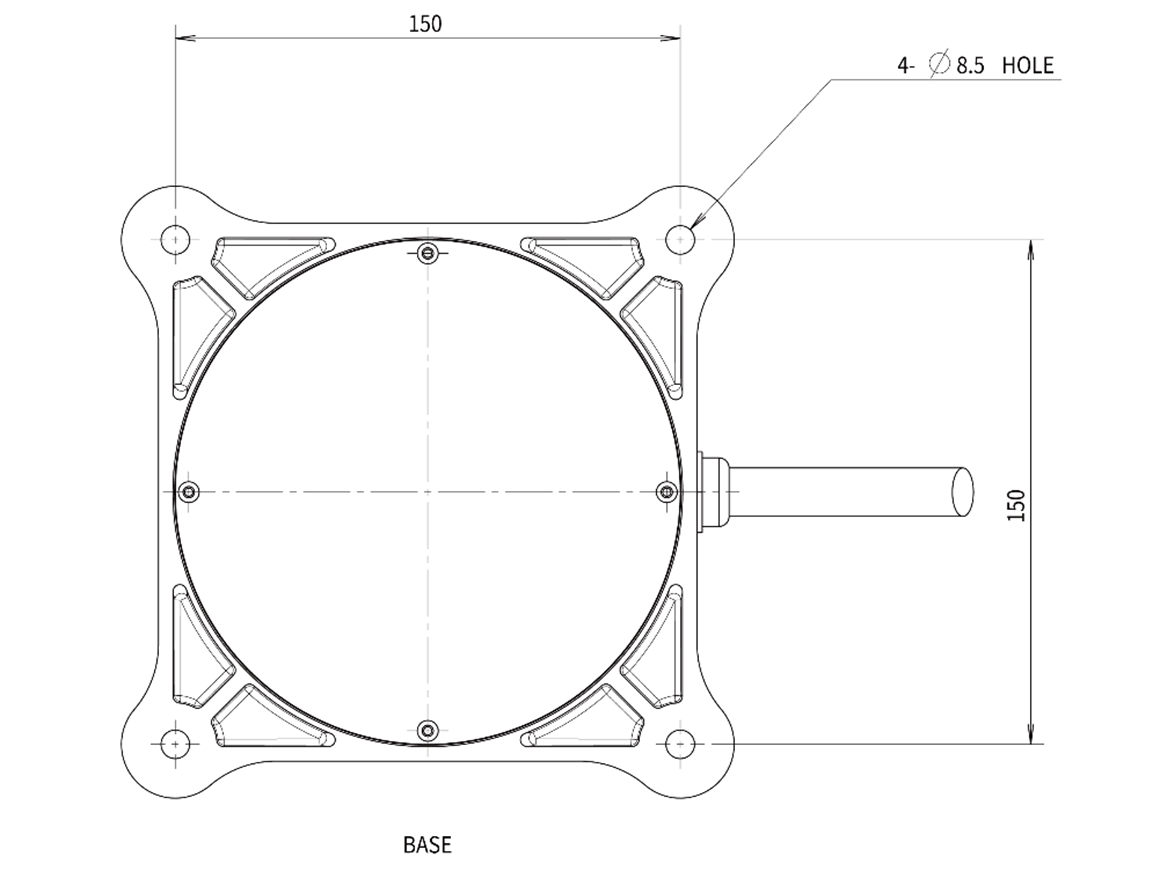
Je použit základní výkres manipulátoru a čtyři šrouby M8. Jednotka [mm]
-
Aby se předešlo uvolnění spojů během provozu manipulátoru, utáhněte šrouby až na doraz.
-
Instalujte základnu robota na pevný povrch, aby manipulátoru snesl zátěž vytvářenou během činnosti (10krát věší než je maximální dotahovací moment a 5krát větší než je hmotnost robota).
-
Manipulátoru bude vibrace základny interpretovat jako kolizi a aktivuje nouzové zastavení. Pro místa instalace, která automaticky mění pozici, proto základnu robota neinstalujte tam, kde dochází k velkému zrychlení pohybu.
-
Rameno manipulátoru namontujte pomocí vhodných metod na konkrétní místo. Montážní povrch musí být pevný.
-
Pokud se manipulátoru dostane na delší dobu do kontaktu s vodou, poškodí ho to. Robota neprovozujte v podmínkách, kde může zvlhnout nebo se dostat do vody.