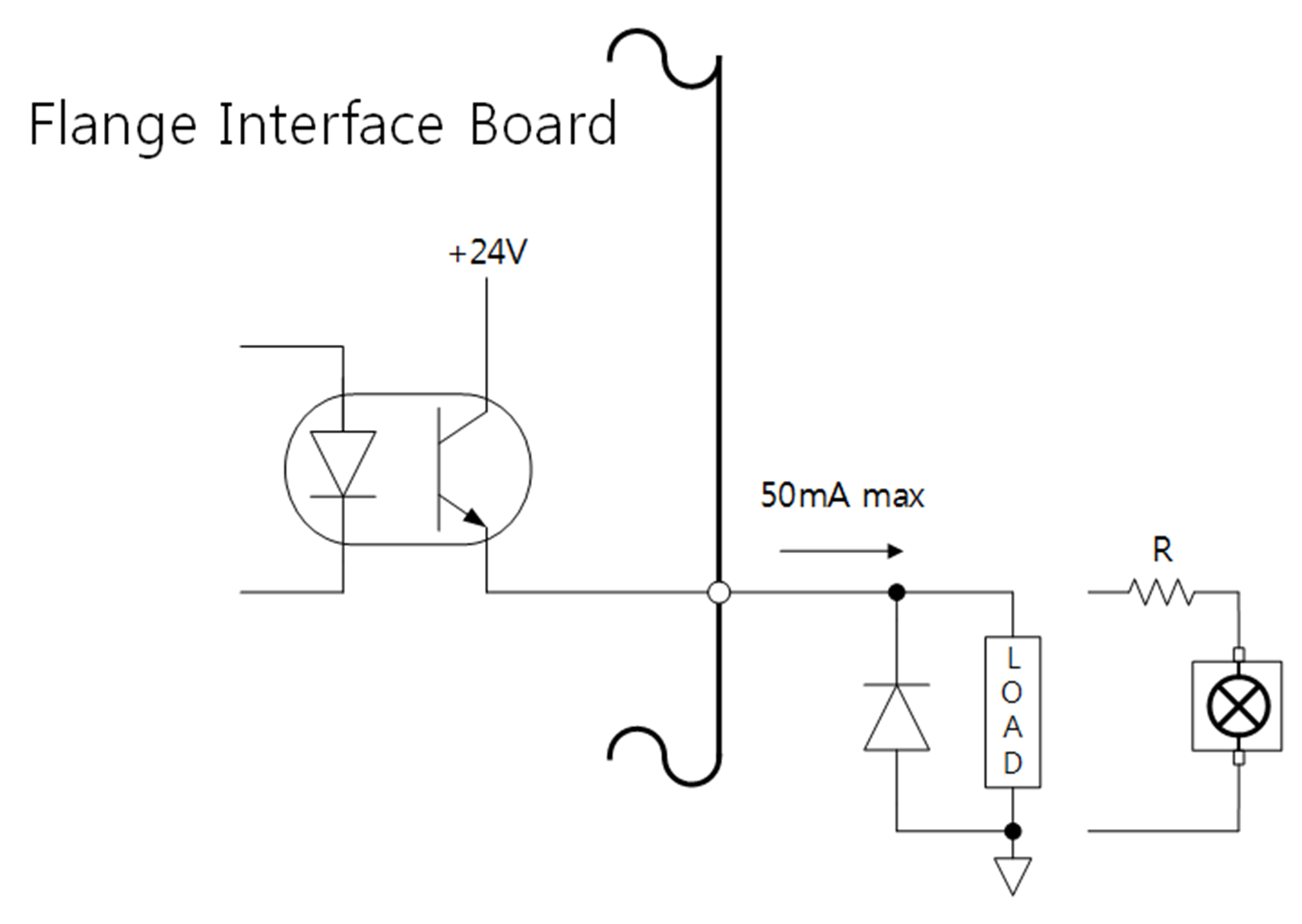
Flange Digital output ist eine PNP-Spezifikation, und der Ausgang photo coupler (Optokoppler) wird im output eingerichtet.
Der entsprechende Kanal am output wird bei Aktivierung des Digital-output auf +24 V aktiviert. Der entsprechende Kanal am output wird bei Deaktivierung des Digital-outputs auf open (floating) (unterbrochen, schwimmend) geändert.
Die elektrischen Spezifikationen für den Digitaloutput lauten wie folgt:
|
Parameter |
Min |
Typ |
Max |
Unit |
|
Voltage when driving 10mA |
23 |
- |
- |
V |
|
Voltage when driving 50mA |
22.8 |
- |
23.7 |
V |
|
Current when driving |
0 |
- |
50 |
mA |
Die Einstellung wird seit dem 22. März 2024 wie folgt berechnet
Digitale Ausgänge unterstützen zwei verschiedene Modi:
|
Mode |
Active |
Inactive |
|---|---|---|
|
PNP (Source Type, default) |
High |
Open |
|
NPN (Sink Type) |
Low |
Open |
Die anfängliche Stromversorgung der Digitalausgänge ist auf 0 V eingestellt und kann auf 12 V oder 24 V eingestellt werden.
Wenn der digitale Ausgang deaktiviert ist, ist der Zustand des entsprechenden Ausgangskanals offen (schwebend).
Die elektrischen Spezifikationen sind unten aufgeführt:
|
Parameter |
Min |
Typ |
Max |
Unit |
|---|---|---|---|---|
|
Voltage when driving 12V mode |
11.4 |
12 |
12.6 |
V |
|
Voltage when driving 24V mode |
22.8 |
24 |
25.2 |
V |
|
Current when driving |
0 |
- |
50 |
mA |
-
Digital-output unterliegt nicht der Begrenzung der Stromstärke. Nichtbeachtung der oben angegebenen technischen Daten während des Betriebs kann zu dauerhaften Schäden am Produkt führen.
-
Nachstehende Abbildung ist ein Beispiel einer Konfiguration mit Digital-output, die beim Anschließen von tool und gripper am Roboter zu beachten ist.
-
Bei der Einrichtung des Stromkreises ist vorher unbedingt die Stromversorgung des Roboters zu unterbrechen.