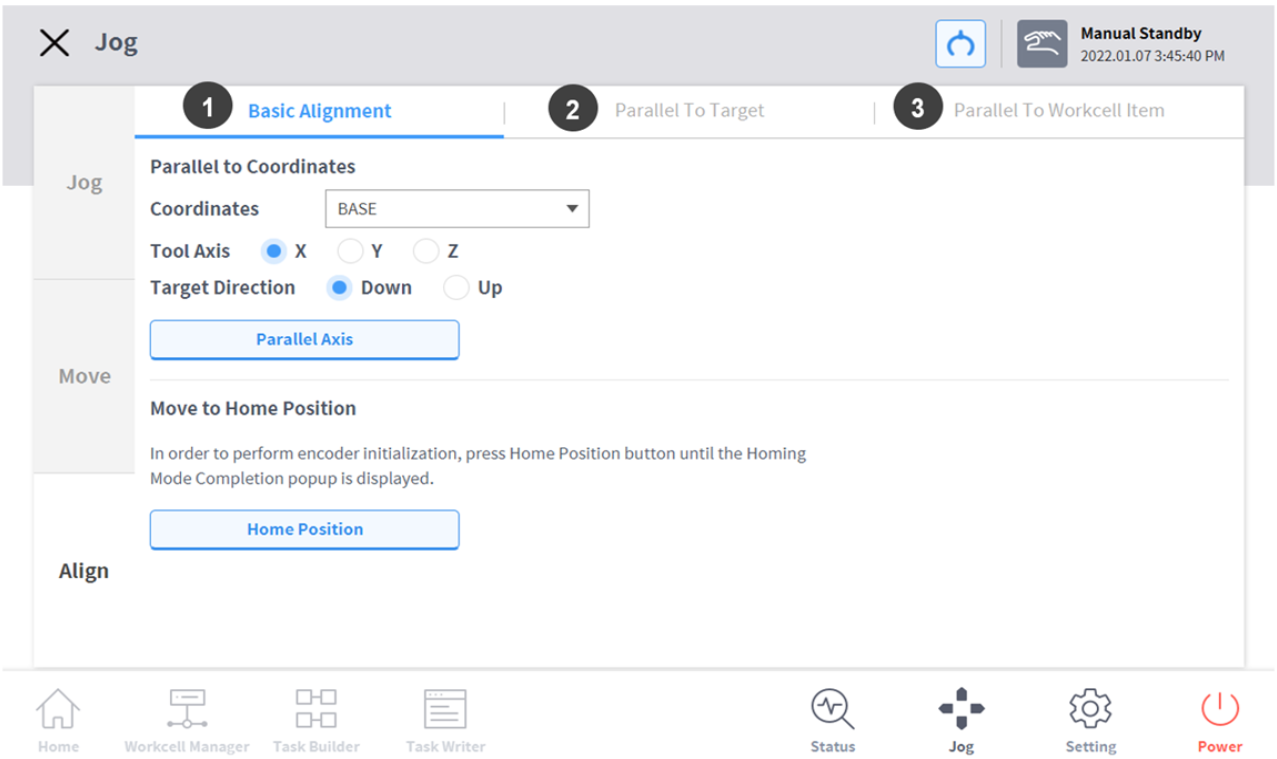
Die Ausrichtungsreferenz des Roboters wird auf dem Bildschirm Align (Ausrichten) eingestellt.
|
Nr. |
Element |
Beschreibung |
|---|---|---|
|
1 |
Basic-Alignment |
Richtet den Werkzeugreferenzpunkt (TCP) des Roboters basierend auf der Basis-/World-Achse und der Zielrichtung aus. |
|
2 |
Align with Target |
Richtet den TCP auf das Ziel aus. |
|
3 |
Align with Workcell Item |
Richtet den TCP auf die Installation aus. |