Az Okos vezérlő beállítása képernyő az A-sorozathoz opcióként adott funkciók beállítására szolgál.
-
Válassza ki az Okos vezérlő beállítása menüt a Robot beállítása menüben.A jelenlegi beállítás információk megjelennek a beállításkezelés ablakban.
-
Állítsa be az Okos vezérlő használata gombot ON (bekapcsolt) értékre.Ha a rendszert ON (bekapcsolt) értékre állított okos vezérlővel indítják újra, akkor az távirányító üzemmódban indul.
-
Feladat kiválasztásaAz Okos vezérlő üzemmódban használandó feladat.
-
Kattintson a megerősítés gombra, és kattintson az Okos vezérlő indítása gombra.Az Okos vezérlő irányítópult képernyő megjelenik, és elérhetővé válnak az okos vezérlőt használó parancsok.Amikor az Okos vezérlő üzemmód Windows-ból indul, a betanítóegység képernyője is az Okos vezérlő képernyőre változik.
|
Sz. |
Elem |
Leírás |
|
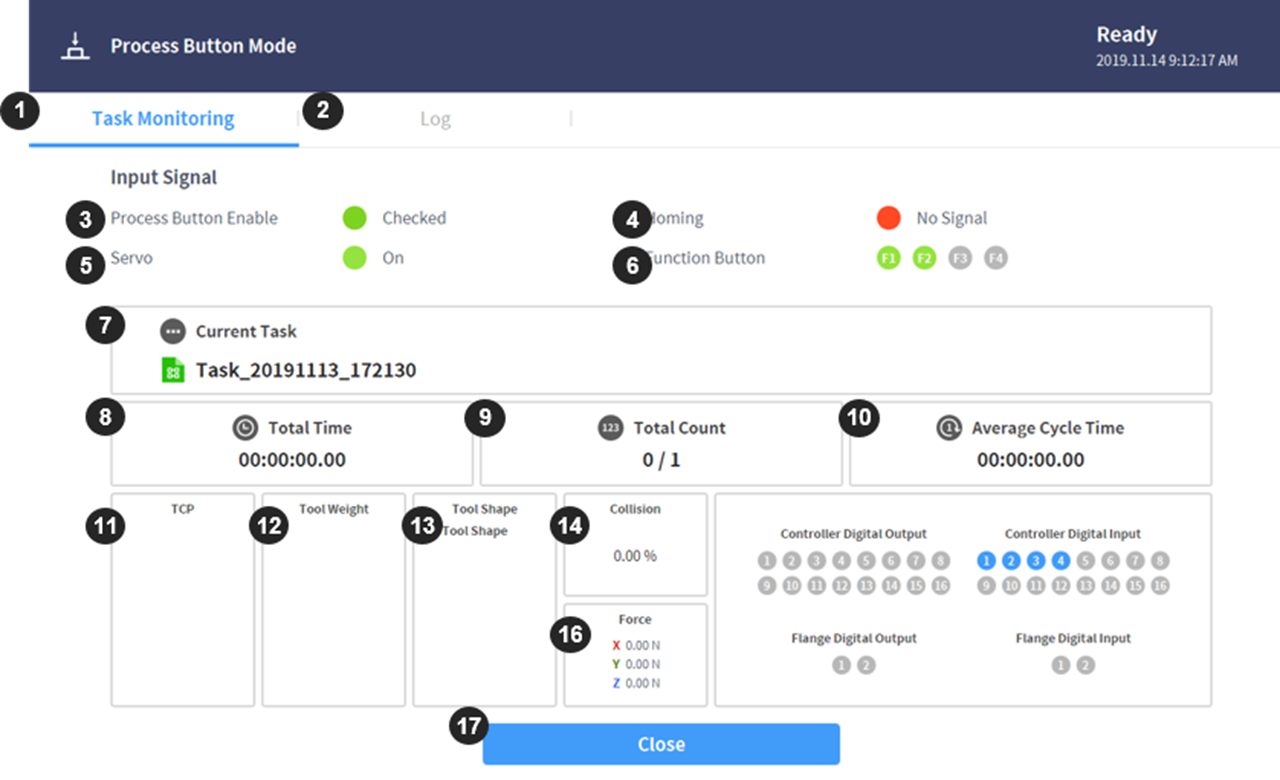
1 |
Task Monitoring Tab |
Ezen a fülön jelennek meg a bemenőjel és az okos vezérlő feladata végrehajtásához szükséges figyelési információk. |
|
2 |
Log Tab |
Ezen a fülön jelennek meg a feladat végrehajtása során gyűjtött naplózási üzenetek. |
|
3 |
Smart Pendant Enable Signal |
Ha az okos vezérlő csatlakozik a vezérlőhöz, akkor bejelölt (zöld). |
|
4 |
Homming Signal |
Amikor az okos vezérlő alapállásba helyező gombját megnyomják, a jelző bejelöltként (zöld) látszik. |
|
5 |
Servo On/Off Signal |
Megjeleníti a Szervó be/ki állapotot |
|
6 |
Function Button Signal |
A P1-P4 megnyomott állapotának jelzői |
|
7 |
Current Task |
Terület, ahol az okos vezérlővel használandó feladat megjelenik |
|
8 |
Total Time |
Feladat teljes lejátszási ideje |
|
9 |
Total Count |
Feladat ciklusok száma |
|
10 |
Average Cycle Time |
Az egyes feladat ciklusok átlagos lejátszási ideje |
|
11 |
TCP Indicator |
A jelenlegi feladat által használt TCP adatok |
|
12 |
Tool Weight Indicator |
A jelenlegi feladat által használt Szerszám súlya adatok |
|
13 |
Tool Shape Indicator |
A jelenlegi feladat által használt Szerszám alakja adatok |
|
14 |
Collision |
Ütközési küszöbbel kapcsolatos adatok |
|
15 |
Force |
Erővel kapcsolatos adatok |
|
16 |
Digital / Flange I/O information |
Digitális / Karima I/O adatok |
|
17 |
Close |
Az Okos vezérlő üzemmódot bezáró gomb. |
Ha Okos vezérlő üzemmódban Vészleállítás vagy Védelmi leállítás következik be, ez az alábbi módon kezelendő:
-
Vészleállítás: Megjelenik egy vészleállítási felugró ablak. A vészleállítás okának elhárítása után a vészleállító kapcsoló meghúzásával vagy elforgatásával a rendszer alaphelyzetbe állítható, és a felugró ablak automatikusan bezárul.
-
A Védelmi leállítás aktiválásakor a rendszer Szervó ki állapotba kerül: Egy piros védelmi leállítási felugró ablak jelenik meg. Ha a védelmi leállítás okának megszüntetése után megnyomja az Okos vezérlő Szervó be gombját, a robot szervóhajtásai bekapcsolnak, és a felugró ablak automatikus bezáródik.
-
A Védelmi leállítás aktiválásakor a rendszer Megszakítva állapotba kerül: Egy sárga védelmi leállítási felugró ablak jelenik meg. Ha megnyomja az Okos vezérlő Visszaállítás gombját a védelmi leállítás okának elhárítása után, a robot normál várakozási állapotra vált – Kézi várakoztatás, Automatikus várakoztatás és HGC várakoztatás.
Olyan biztonsági túllépések esetében, ahol az ok a robot mozgatása nélkül nem távolítható el, használja a Clamping Escape vezérlőpult szerint opciót. -
Az egyes módok állapotával kapcsolatos részletekért olvassa el a „ Állapot és karima LED színe az egyes üzemmódoknál” című részt