L'utilizzo di Jog+ consente l'uso della funzione jog mentre si sta eseguendo contemporaneamente un altro lavoro.
Questo può essere utilizzato quando è richiesto un movimento preciso al punto di destinazione durante l'apprendimento del robot.
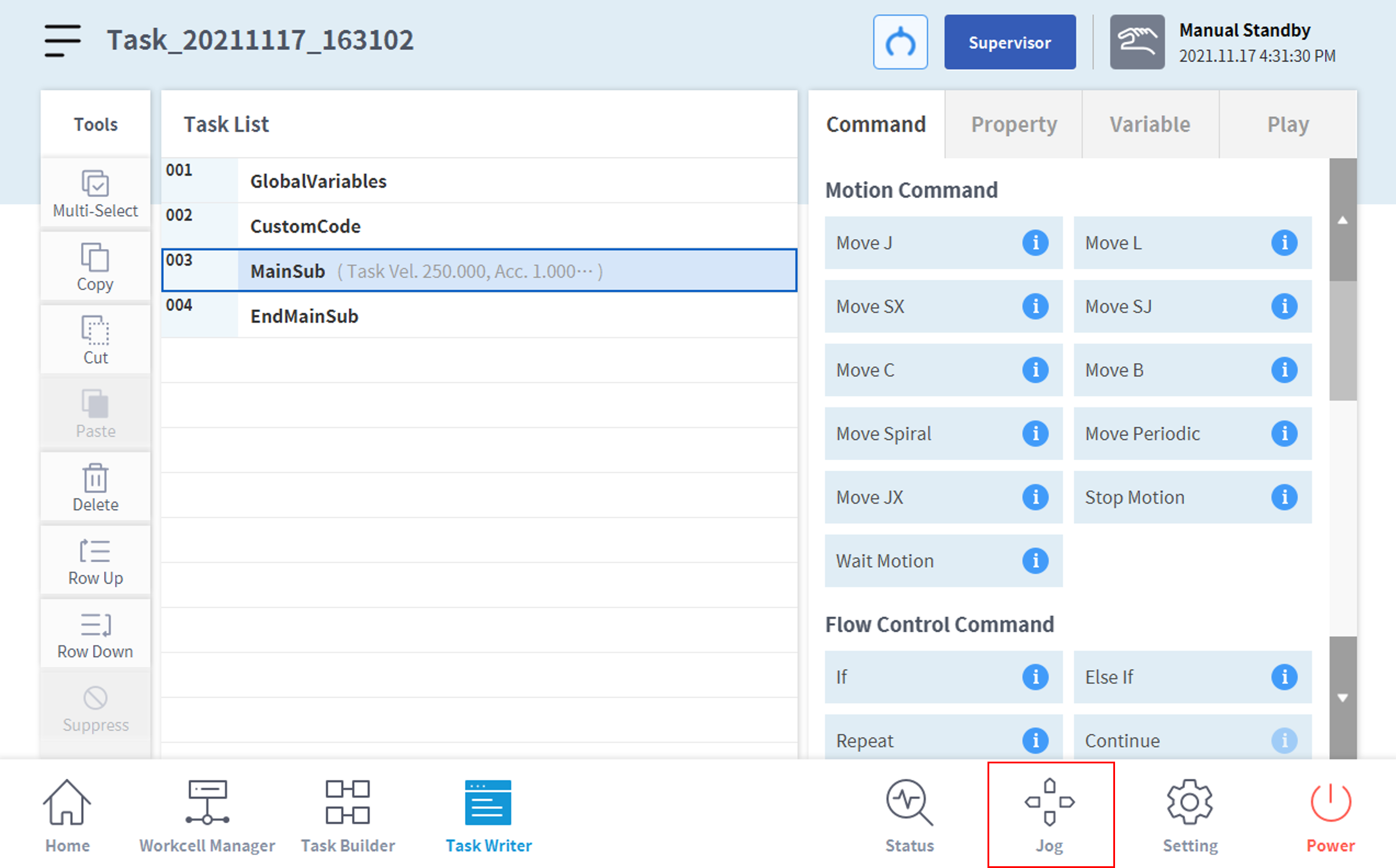
Jog Plus può essere attivato nei seguenti modi.
-
Premere il pulsante jog per più di 1 secondo nel menu principale nella parte inferiore dello schermo.
-
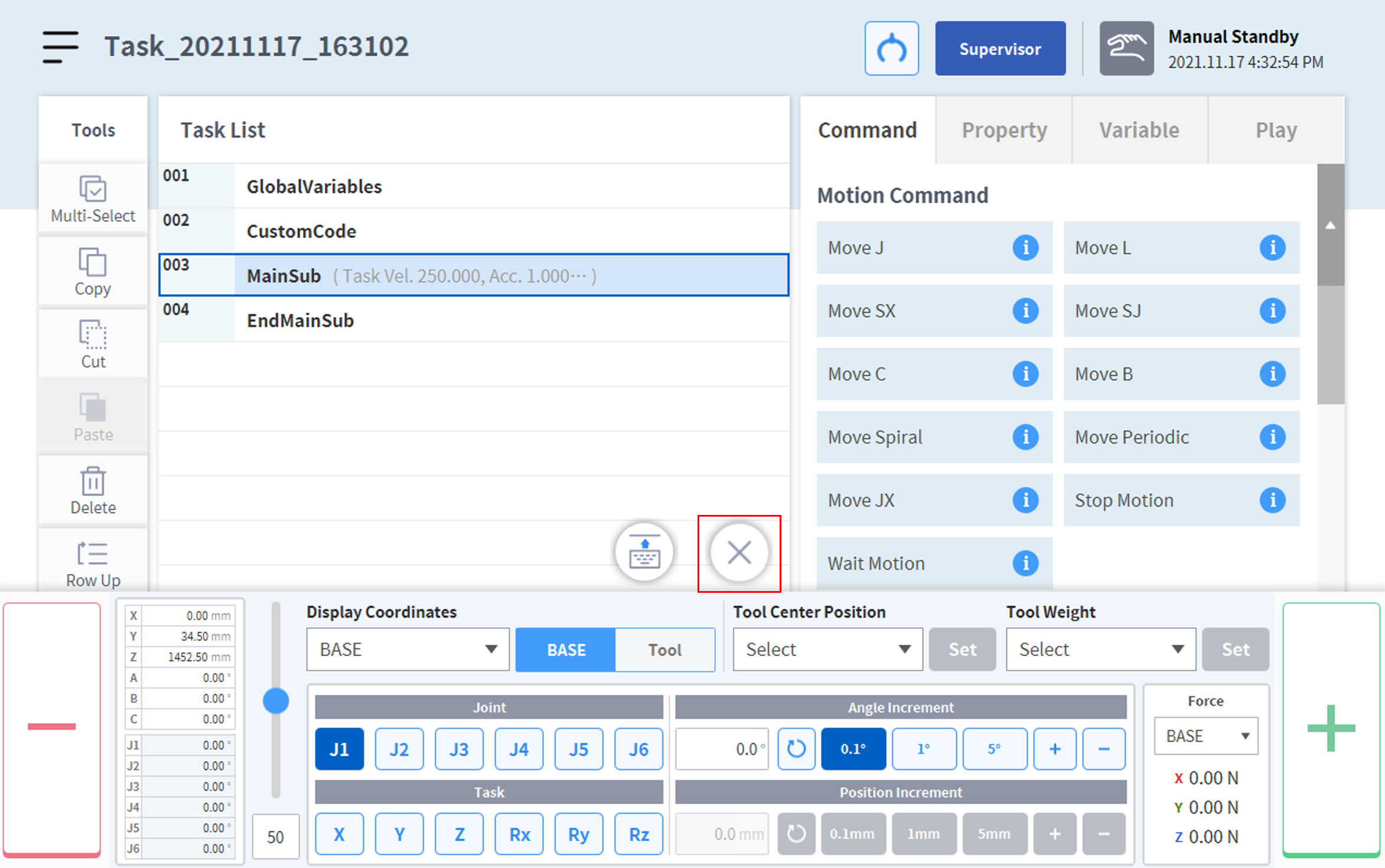
Viene attivata la schermata Jog Plus
-
Jog Plus può essere disattivato premendo il pulsante "X".
|
N. |
Voce |
Descrizione |
|---|---|---|
|
1 |
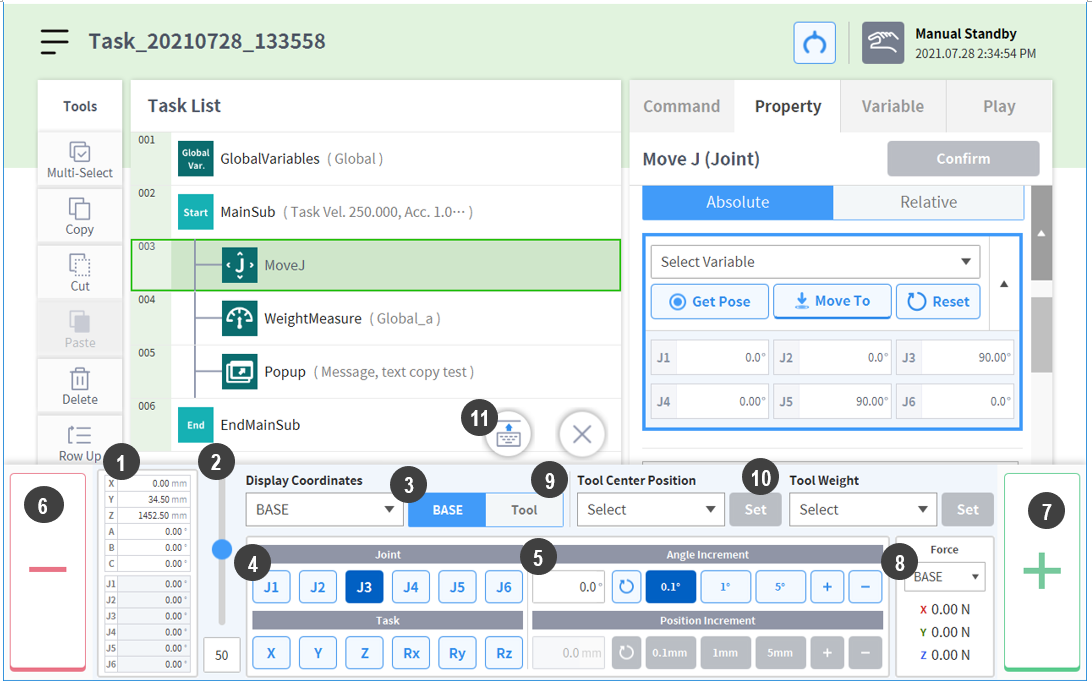
Current robot pose |
Visualizza la posizione del robot in base alle coordinate impostate. |
|
2 |
Manual Mode Speed |
Configura la velocità di movimento del robot in modalità manuale. La velocità può essere regolata trascinando il cursore. Se il cursore è al 100%, la massima velocità del giunto corrisponde sulla scheda Jog è 30 gradi/s e la massima velocità dell'attività è 250 mm/s. Questa velocità influenza la velocità controllata dai pulsanti jog e di movimento. |
|
3 |
Reference Point Setting |
Imposta il punto di riferimento per l'allineamento alle coordinate dell'attività. Base: Imposta le coordinate dell'attività in base alla Base del robot. Mondo: Imposta le coordinate attività in base alle coordinate Mondo impostate. Utensile: Configura le coordinate dell'attività in base all'utensile montato all'estremità del robot a sei assi. |
|
4 |
Select Axis |
Seleziona l'asse da muovere. Scheda Giunto: Selezionare un asse tra J1 - J6. Scheda Attività: Selezionare un asse tra X - Rz. |
|
5 |
Select Increment |
Inserire un numero relativo al numero di assi da muovere. |
|
6 |
Move – Button |
Se il pulsante viene mantenuto premuto, l'asse selezionato viene mosso in direzione - in accordo con la posizione di incremento. |
|
7 |
Move – Button |
Se il pulsante viene mantenuto premuto, l'asse selezionato viene mosso in direzione + in accordo con la posizione di incremento. |
|
8 |
Force Monitoring |
Visualizza la forza esterna necessaria in base al sistema di coordinate selezionato. |
|
9 |
TCP Setting: |
Imposta TCP. |
|
10 |
Tool Weight Indicator |
Imposta il peso dell'utensile. |
|
11 |
Change Jog+ location |
Modifica la posizione Jog+ nella parte superiore e inferiore dello schermo. |