Per verificare o testare i dati I/O, toccare il pulsante Status (Stato) nel Menu principale.
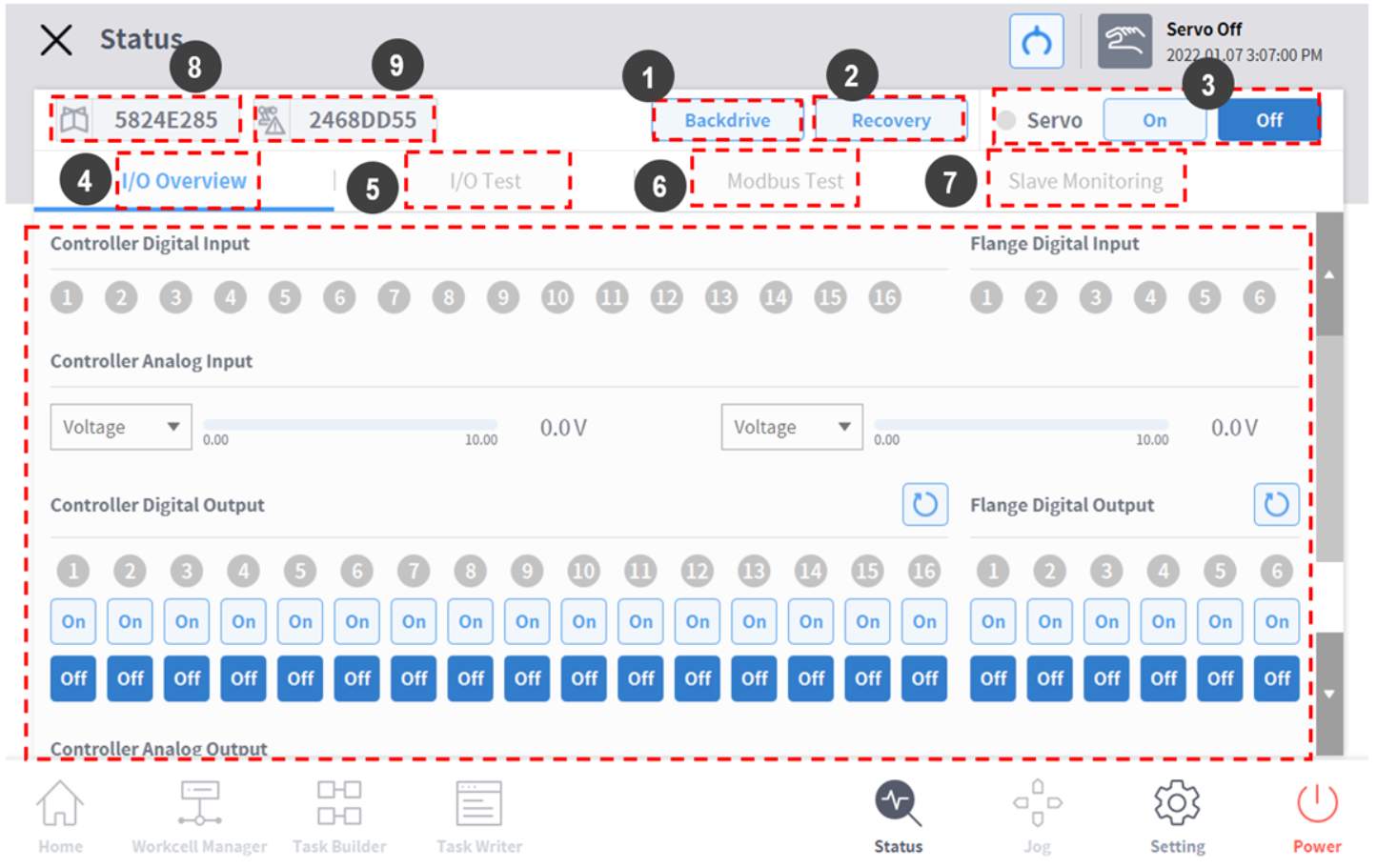
La finestra Status (Stato) consente di verificare i dati I/O dei dispositivi collegati alla centralina di comando e alla flangia, consentendo anche di eseguire la modalità Backdrive (Marcia indietro) e la funzione Safety Recovery (Ripristino di sicurezza).
La finestra Status (Stato) è una finestra popup, quindi è possibile toccare il pulsante Status nella schermata Home, Task Builder o Task Writer anche durante la modalità automatica per verificare i dati I/O. Il test dell'uscita non può essere eseguito durante la modalità automatica.
|
N. |
Voce |
Descrizione |
|---|---|---|
|
1 |
Backdrive |
Se il robot viene arrestato a causa di un'anomalia durante il funzionamento, l'utente può interrompere l'alimentazione ad ogni giunto e spostare manualmente il giunto nella posizione desiderata per ripristinare il normale stato di funzionamento. |
|
2 |
Safety Recovery |
Imposta l'angolo e la posizione del robot quando il robot viene configurato in modalità ripristino software e in modalità imballaggio. |
|
3 |
Servo On |
Fornisce l'alimentazione necessaria a muovere i giunti del robot. |
|
4 |
I/O |
Gestisce gli stati degli I/O analogici e digitali della centralina di comando e della flangia. |
|
5 |
I/O Test |
Controlla e sottopone a test i dispositivi I/O digitali e analogici della centralina di comando e della flangia utilizzati dall'attività. |
|
6 |
Modbus Test |
Sottopone a test i segnali del dispositivo Modbus configurato. |
|
7 |
Slave Monitoring |
Monitora tutte le funzioni slave fornite dallo slave Industrial Ethernet (PROFINET, EtherNet / IP, Modbus) |
|
8 |
Job Space Status Value |
Visualizza la crittografia di tutti i dati dello spazio operativo registrati per verificare se l'impostazione dello spazio di lavoro è stata modificata. |
|
9 |
Safety Setup Status Value |
Visualizza la crittografia di tutti i dati di sicurezza registrati per verificare se l'impostazione di sicurezza è stata modificata. |