設置時の注意事項
-
コントローラーを設置する前に、十分な設置空間を確保してください。空間が確保されていない場所に設置する場合、コントローラーが損傷したり、マニピュレーター及びティーチペンダントのケーブルが断線することがあります。
-
製品の電源を接続するときは、入力電源を確認してから接続してください。製品の定格入力電源(22-60VDC)と異なる入力電源が接続された場合、製品が正常に動作しなかったり、 コントローラーが損傷することがあります。
設置環境
コントローラーを設置する際には、以下のような事項を考慮して設置してください。
-
コントローラーを設置する前に、十分な設置空間を確保してください。
-
必ず コントローラーを固定してください。
-
移動式モバイル装備内に固定されていない他の物がないようご注意ください。
ハードウェアの設置
ロボットを使用する前に、システムの必須要素であるマニピュレーター、コントローラー、ティーチペンダントを設置して電源をつないでください。各要素を設置する方法は以下のとおりです。
コントローラーの固定
コントローラーを配置し、固定プレートにある6mmの穴6つに、M5ボルトを利用して固定してください。 ボルトが緩まないよう、最後まで締めてください。 (横向きで配置する場合、5個のM5ボルトを使います。)
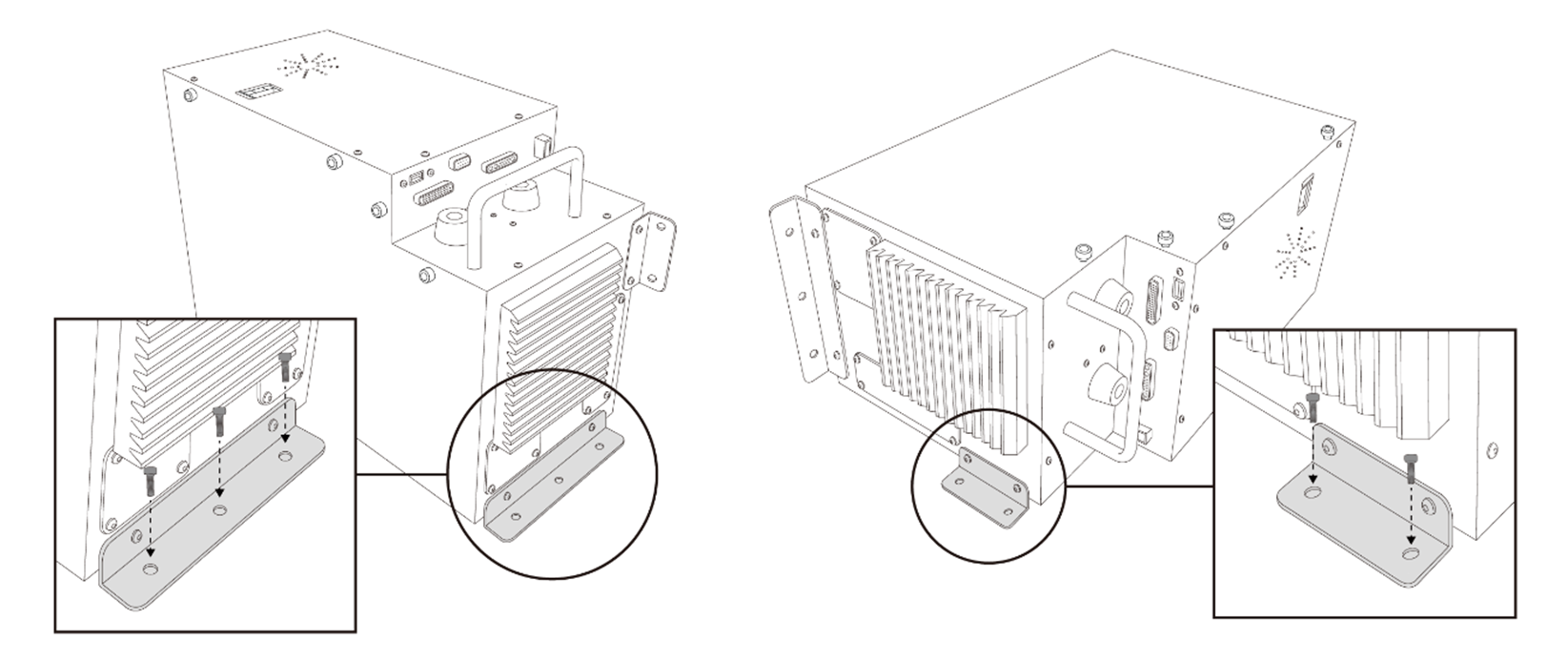
ボルトが緩まないよう、最後まで締めてください。
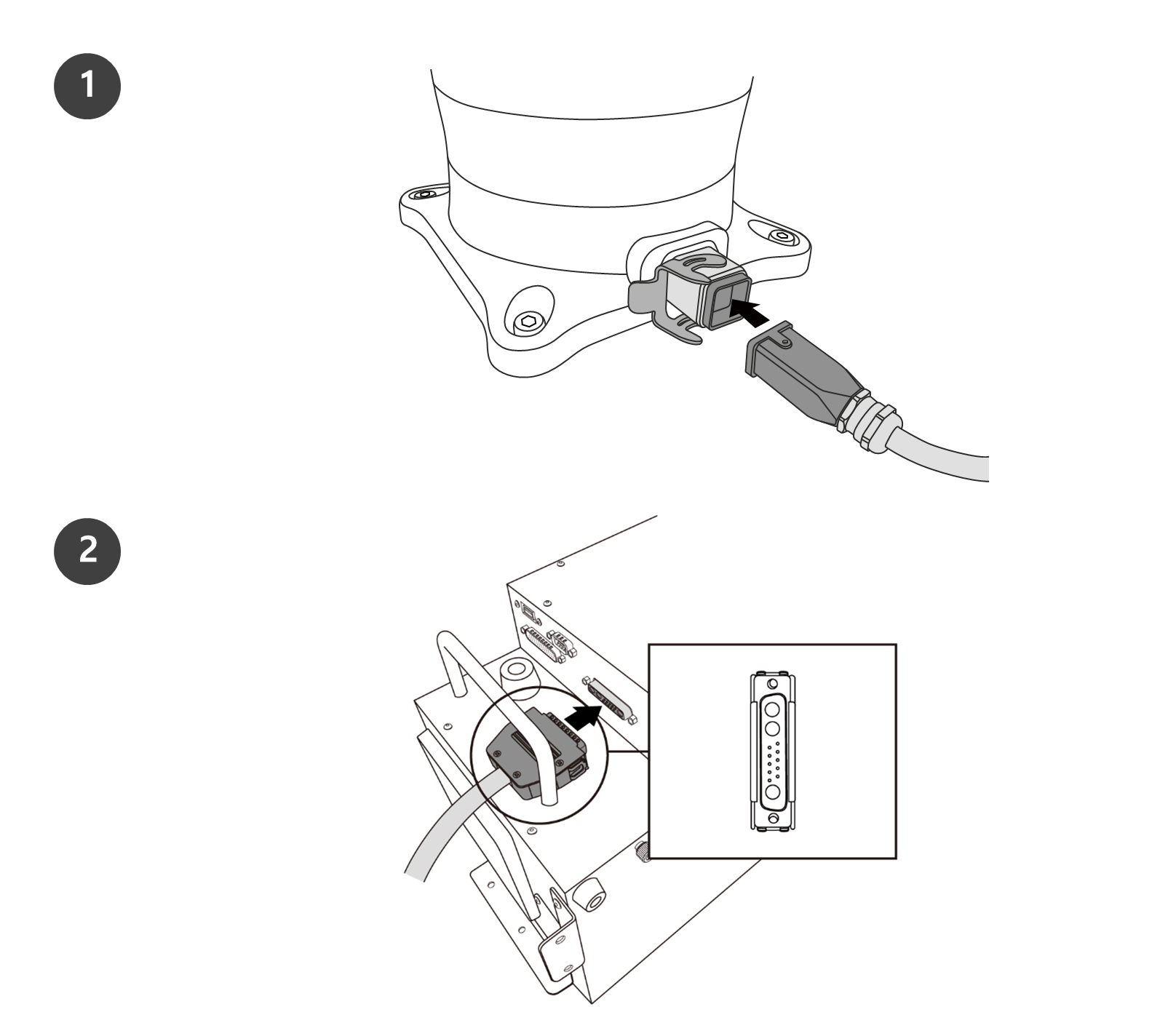
マニピュレーターと コントローラーを接続する
|
|
説明 |
|---|---|
|
1 |
マニピュレータケーブルをコントローラに接続し、固定リングを配置します
|
|
2 |
マニピュレータケーブルの反対側の端をコントローラコネクタに接続します
|
-
ロボットに電源が入っている状態で、ロボットのケーブルを分離しないでください。ロボットの故障原因になることがあります。
-
ロボットのケーブルを任意に改造したり延長しないでください。
-
コントローラーを移動式モバイル装備内に設置する場合は、機器内の換気のために両側面から50mm離して余裕スペースを確保してください。
-
コントローラーの電源を入れる前に、コネクタが正しくロックされているか確認してください。
-
システムを構成する際、基本的に機器間のノイズの影響とシステムの誤動作を防ぐため、ノイズの低減設備を設置することをお勧めします。
-
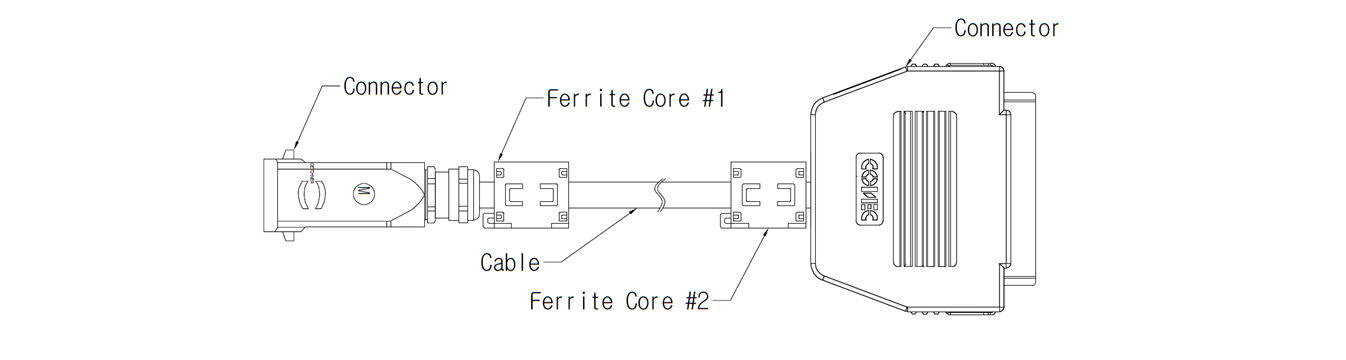
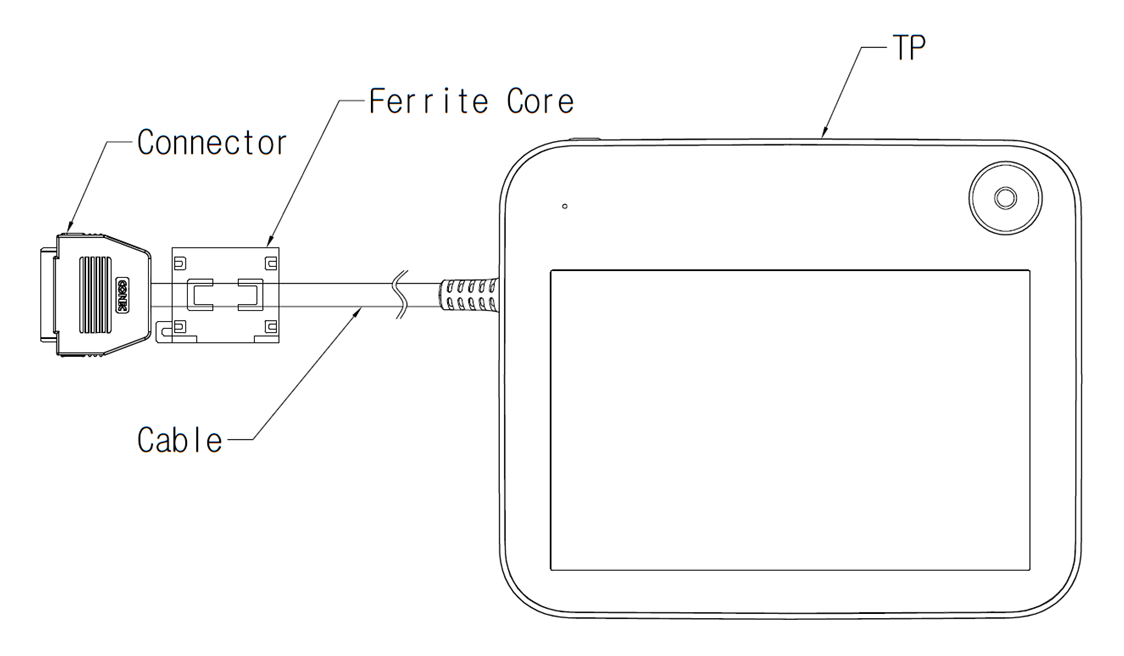
コントローラーが電磁波ノイズの影響を受けたり、他の機器に影響を与える場合、正常な使用のためにフェライトコアを設置しなければなりません。設置位置は以下のとおりです。
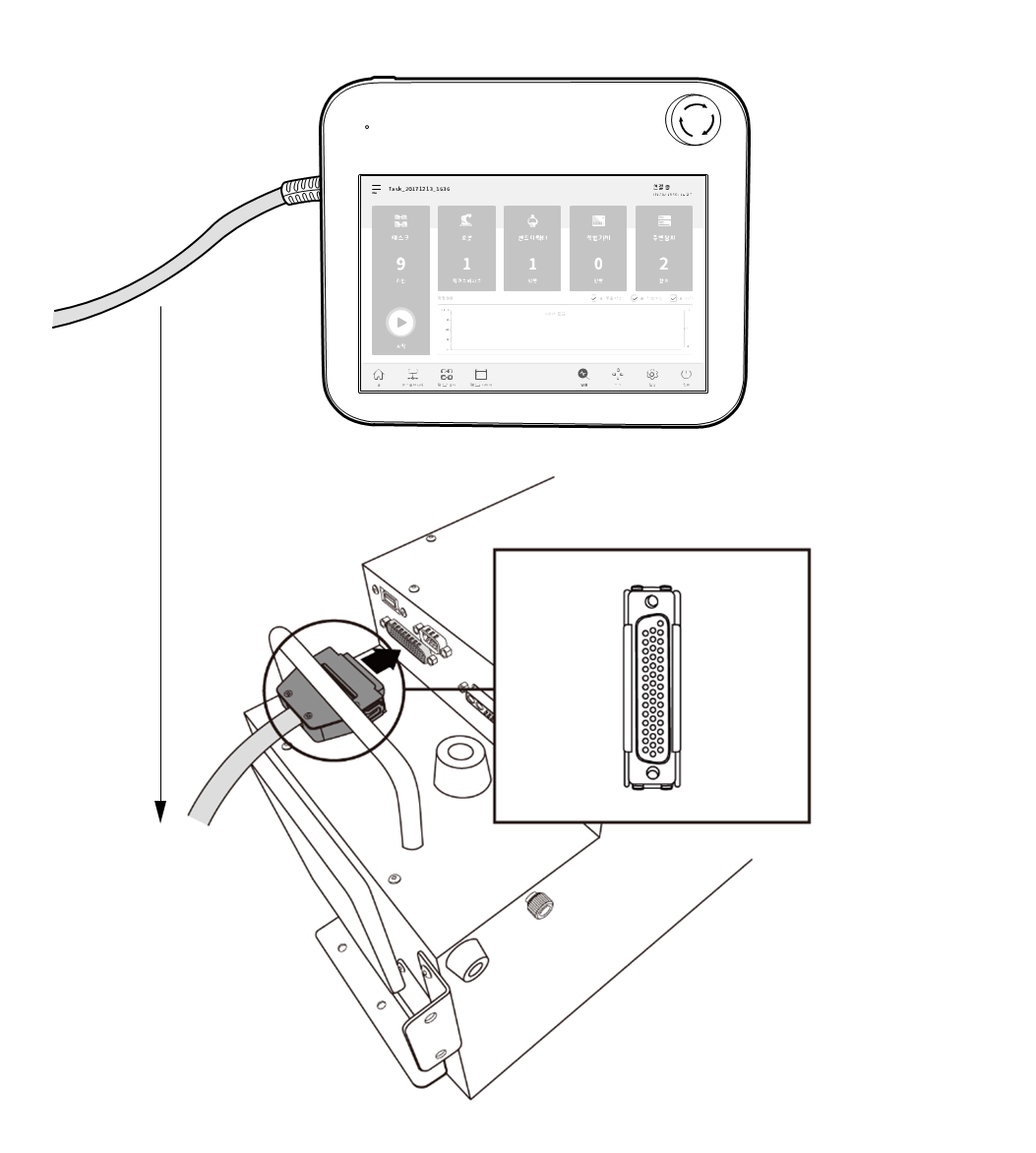
コントローラーとティーチペンダントをつなぐ
ティーチペンダントのケーブルをコントローラーの該当接続部にカッチっと音がするまで挿し込んで、抜けないようにしてください。
-
ケーブルをつなぐ際、ピン部分が曲がらないように接続部の形をよく確認してからつないでください。
-
ティーチペンダントを移動式モバイル装備またはコントローラーにかけて使用する場合、接続ケーブルにひっかかって転ばないように注意してください。
-
コントローラー、ティーチペンダント、ケーブルが液体に触れないように注意してください。
-
コントローラーとティーチペンダントは、埃まみれや濡れた環境の場所に設置しないようにしてください。
-
コントローラーとティーチペンダントは、絶対に埃のある環境にさらされてはなりません。導電性粉塵のある環境では特に注意してください。
-
システムを構成する際、基本的に機器間のノイズの影響とシステムの誤動作を防ぐため、ノイズの低減設備を設置することをお勧めします。
-
ティーチペンダントが電磁波ノイズの影響を受けたり、他の機器に影響を与える場合、正常な使用のためにフェライトコアを設置しなければなりません。設置位置は以下のとおりです。
マニピュレーター接続ケーブルとティーチペンダントケーブルを配置
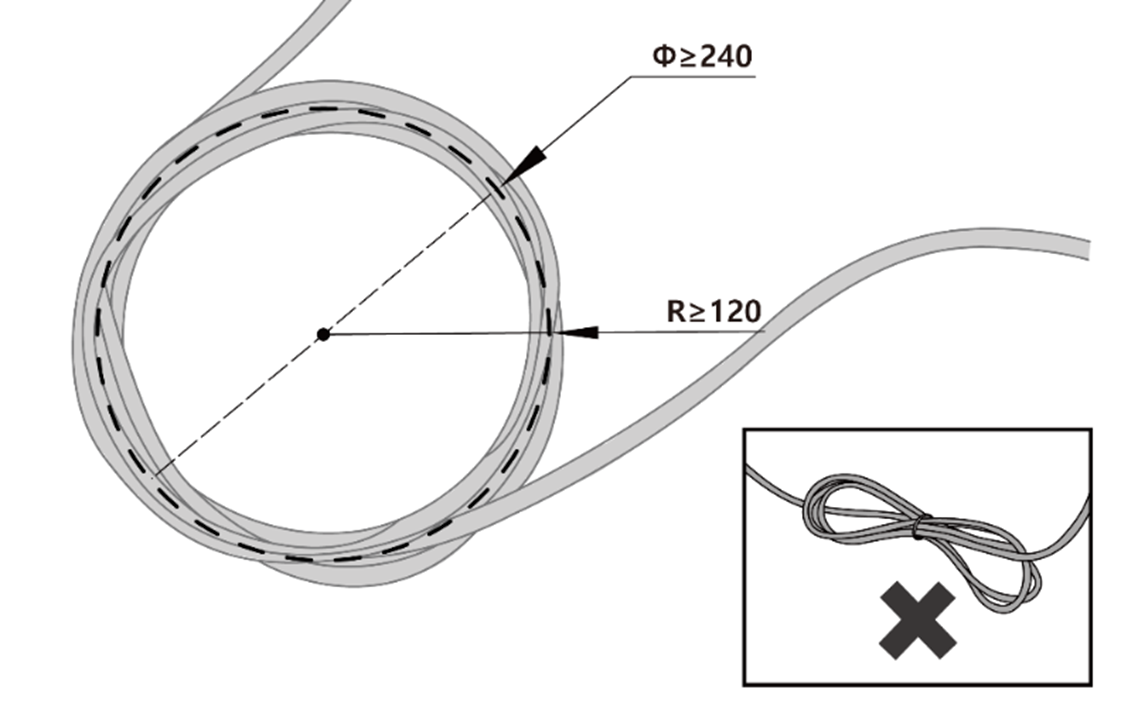
マニピュレーター接続ケーブルとティーチペンダントケーブルを配置する際、ケーブルの曲率半径が最低曲率半径(120mm)以上になるように配置してください。
-
ティーチペンダントケーブルの両側の接続部位は、できるだけ最低曲率半径(120mm)以上の直線になるように配置してください。
-
曲率半径が最低曲率半径(120mm)以下になった場合、ケーブルの断線または製品破損の原因になることがあります。
-
電磁波ノイズが発生することがある環境では、適合したケーブル設置と措置を取ると誤動作などを防止できます。
コントローラーの電源をつなぐ
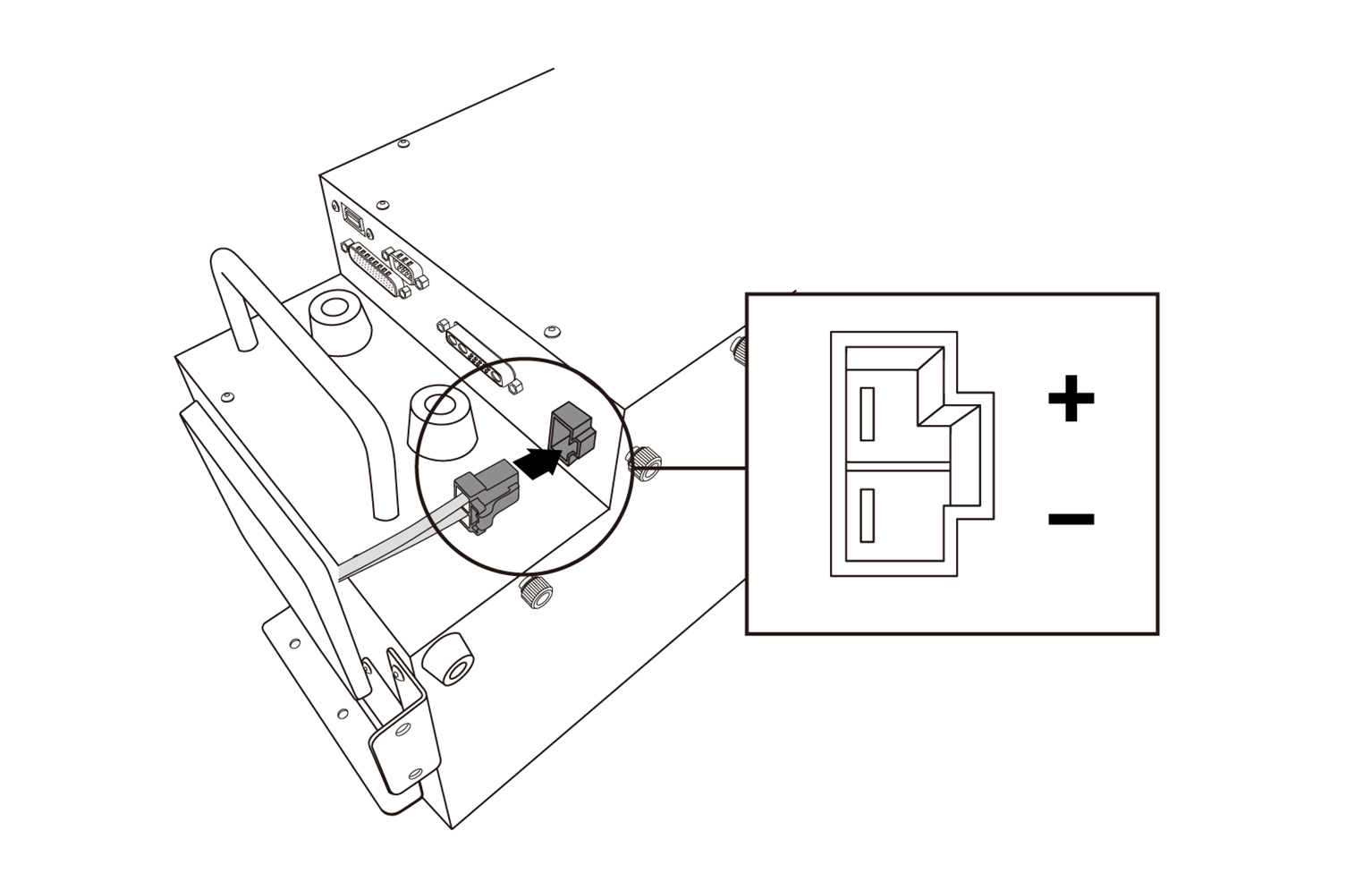
電源ケーブルをコントローラーの該当接続部にカッチっと音がするまで挿し込んで、抜けないようにしてください。
-
電源ケーブルをつないでから、ロボットを正しく接地したか確認してください(電気的地面に連結)。コントローラー内の接地シンボルに関連したネジのうち、使用しなかったネジでシステムの全装備に対し共通の接地を行ってください。接地コンダクターは、最小限システムにおいて最高電流の電流等級を持っていなければなりません。
-
コントローラーの入力電力は、漏電遮断器などで保護してください。
-
ロボットのケーブルを勝手に改造したり延長しないでください。火事が起きたりコントローラーが故障することがあります。
-
コントローラーの電源を供給する前に、すべてのケーブルがつながっているか確認してください。常に本来提供された正しい電線を使用してください。
-
入力電圧の極性が反対につながらないように注意してください。
-
システムを構成する際、すべての機器を一度に切ることのできる電源スイッチを設置することをおすすめします。
-
DC用のコントローラーを使用する場合、負荷及びモーションによってロボットの動作が制限されることがあります。
-
入力電圧が48V以下の場合、負荷及びモーションによってロボットの動作が制限されることがあります。
-
電源供給のためには、接地や漏電遮断器などの最低要求条件を満たさなければなりません。電気仕様は以下のとおりです。
|
パラメータ |
仕様 |
|
入力電圧 |
22 – 60 VDC |
|
定格入力電流 |
30 A |