Skip to main content
Manual PDF download
ROS 2 Docs.
API Docs.
Training Video
V3 Manual
2.12.4
2.12.3
2.12.2
2.12.1
2.12
2.11.2
2.11.1
2.11.0.1
2.10.3
1. M/H Series
2. A Series
3. E Series
4. P Series
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main navigation
Close navigation
2.12.4
2.12.3
2.12.2
2.12.1
2.12
2.11.2
2.11.1
2.11.0.1
2.10.3
1. M/H Series
2. A Series
3. E Series
4. P Series
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main
Manual PDF download
ROS 2 Docs.
API Docs.
Training Video
V3 Manual
Main
パート 1 :安全マニュアル
パート 2 :ロボットを起動しています
ステップ 1 :ロボットのインストール
ステップ 2 : ツールのインストールと I/O テスト
ツールを取り付けます
システムの電源を切ります
ワイヤを接続します
システムの電源を入れます
コントローラとフランジ I/O をテストします
ステップ 3 :ロボットの操作と設定
ステップ 4 : タスクプログラムを作成します
パート 3 :インストールマニュアル
パート 4 :ユーザーマニュアル
付録
Breadcrumbs
Home
User manual (V2.12.4)
パート 2 :ロボットを起動しています
ステップ 2 : ツールのインストールと I/O テスト
On this Page
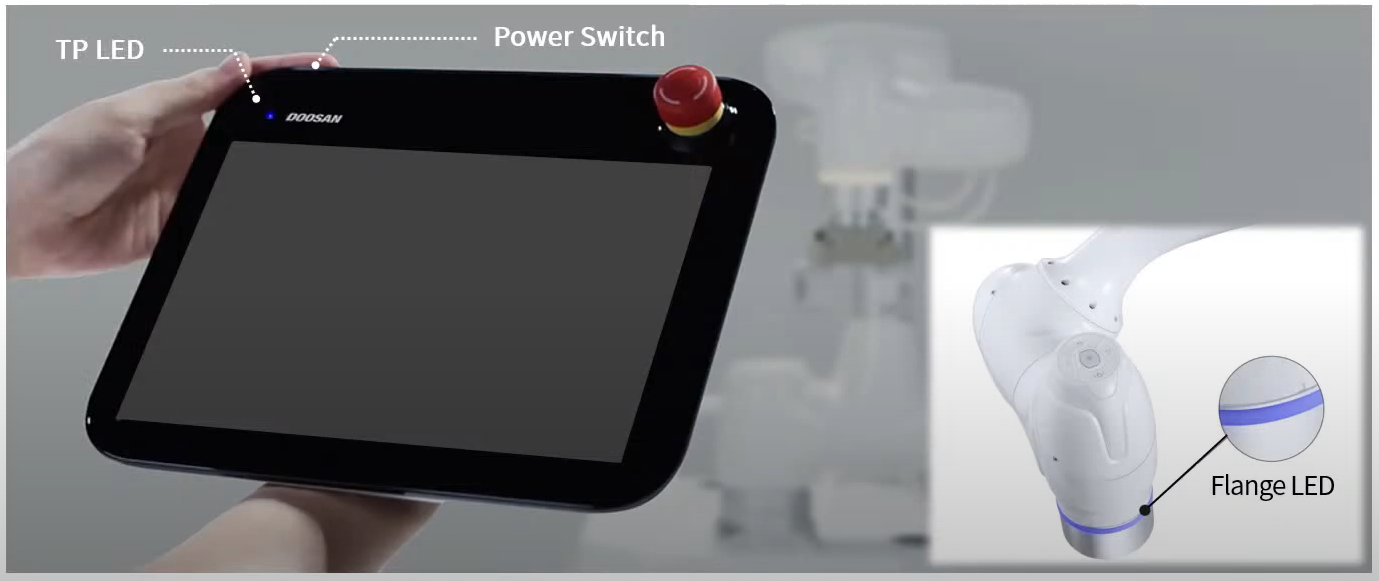
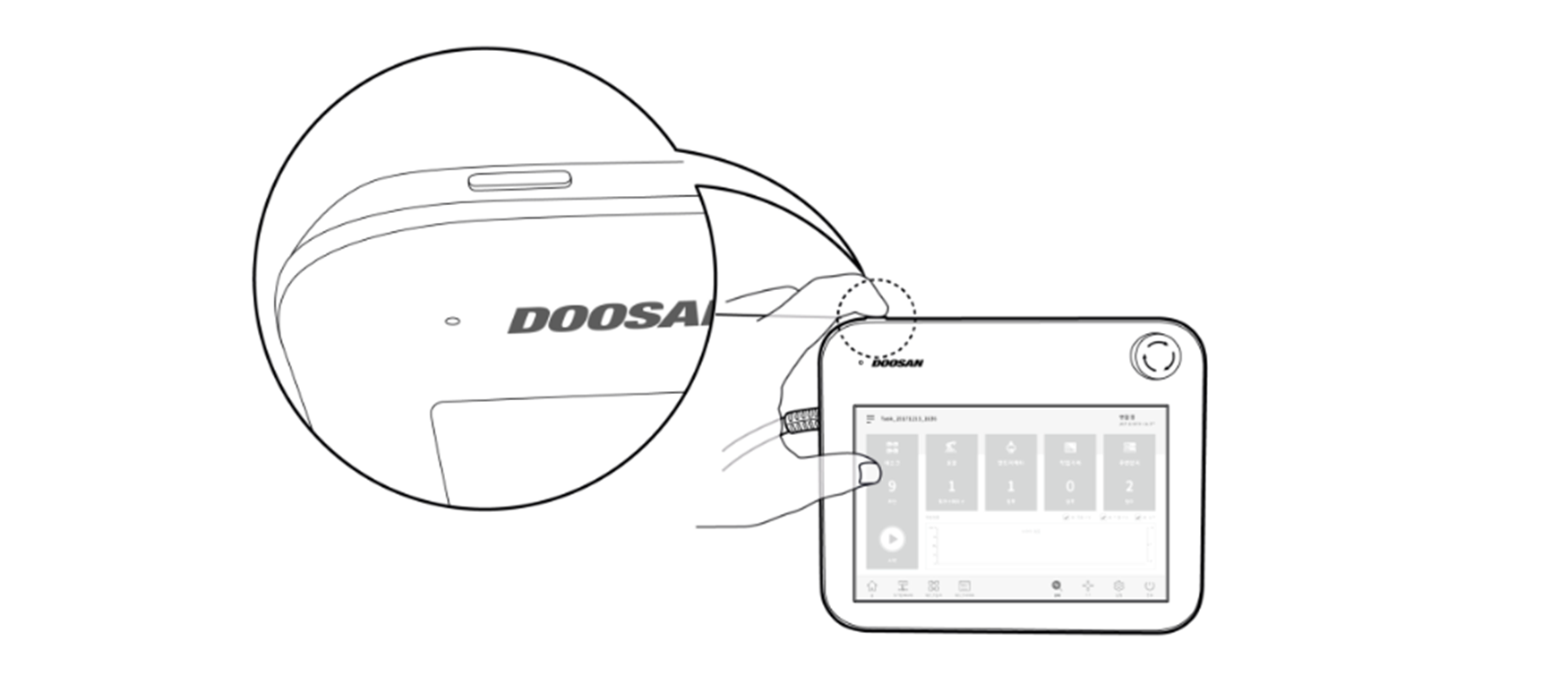
システムの電源を入れます
必須
簡単
1 分
システムの電源を再び入れます。ティーチペンダントの画面が表示されるまで、電源ボタンを押し続けます。