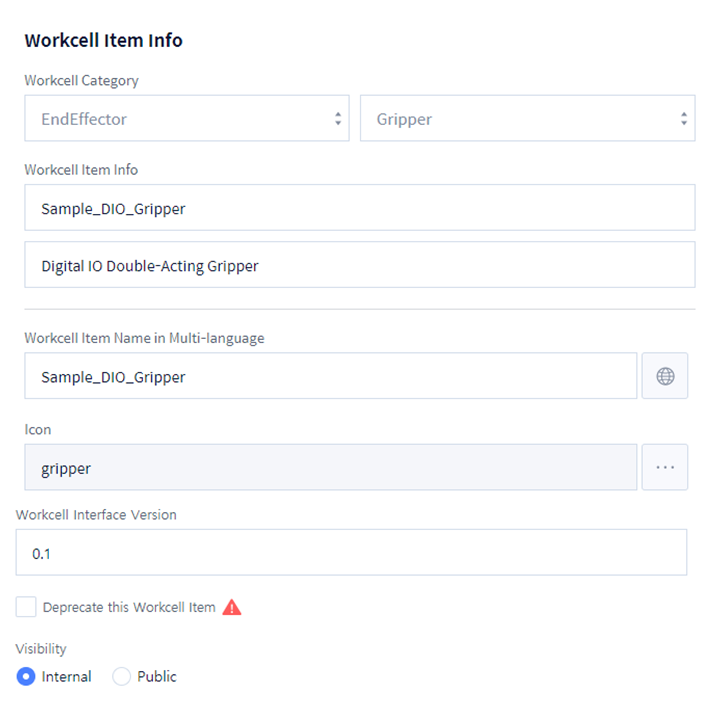
1단계로 'General Info'를 작성해야 합니다. 아래 이미지와 같이, 'Workcell item Info'의 정보를 입력하십시오.
-
'WCI Category'를 선택합니다.EndEffector와 Gripper를 선택하십시오.
-
'WCI Info'에 'WCI Name'과 'Description'을 아래와 같이 입력하십시오.WCI Name: Sample_DIO_GripperDescription: Digital IO Double-Acting Gripper
-
'Workcell Item Name in Multi-language'에 WCI의 이름을 입력하십시오. 입력된 이름이 티치 펜던트에서 WCI 이름으로 표시됩니다.
-
Workcell Item Name in Multi-language: Sample_DIO_Gripper
-
또는 'Language Code'를 입력하십시오.
두산로보틱스에서 미리 등록한 단어('Language Code')에 한해서 다국어 지원이 가능합니다.
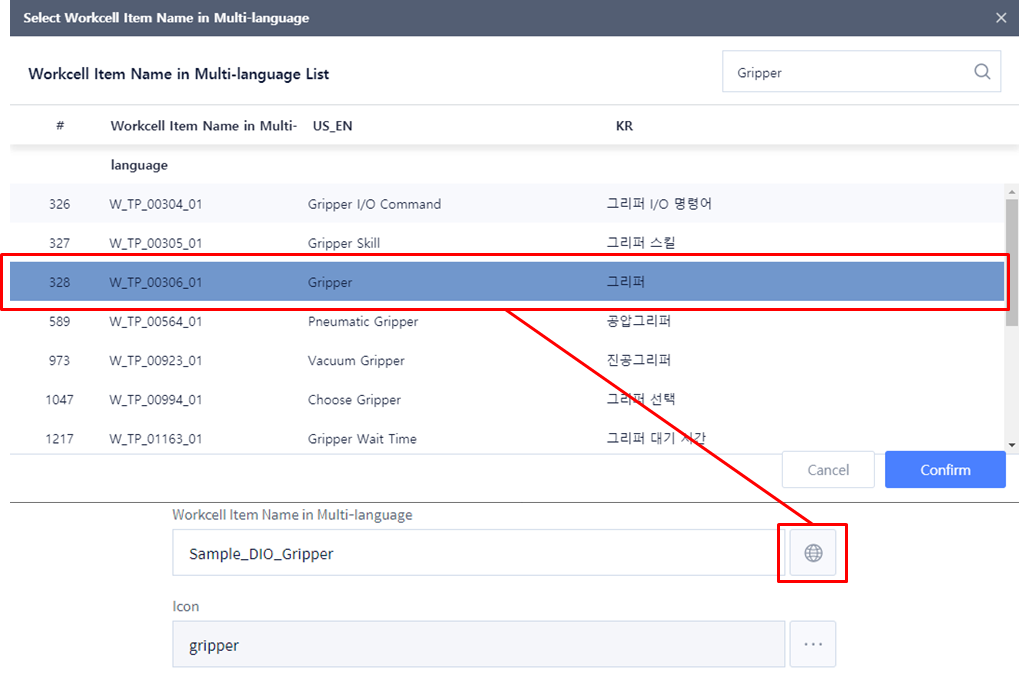
'Language Code'를 찾는 방법은 아래와 같습니다.
-
다국어 아이콘 버튼을 클릭하십시오.
-
찾으려는 단어를 영어로 검색하십시오.
-
단어 선택 후 확인(Confirm)을 누릅니다.
-
'Workcell Item Name in Multi-language'에 'Language Code'가 입력됩니다.
ex) Gripper를 검색하여 선택하는 경우에는 'W_TP_00306_01'가 자동으로 입력됩니다. -
'Language Code'로 입력된 이름은 티치펜던트에서 설정된 언어의 국가에 맞춰서 해당 국가 언어로 표시됩니다.
-
-
-
Icon에서 '...' 버튼을 눌러서 WCI의 Icon을 설정하십시오. 두산로보틱스에서 미리 등록한 아이콘에 한해서 이미지 검색 및 등록이 가능합니다. Icon: gripper
-
'Workcell Interface Version'에 WCI의 버전을 입력하십시오.Workcell Interface Version: 0.1
-
'Visibility Type'을 선택하십시오.Visibility Type: Internal내부 접근만 허용하는 경우 'Internal'을 선택하십시오.외부 접근을 허용하는 경우 'Public'을 선택하십시오.