2단계로 'Workcell Item Setting'을 작성해야 합니다. 상단 메뉴에서 'Workcell Item Setting'을 클릭합니다.
이 단계에서는 복동식 그리퍼 WCI에서 사용하는 디지털 I/O 통신과 신호를 추가하고 Action 기능을 추가하기 위해 DRL을 작성합니다. Workcell Item Setting에 추가할 수 있는 Component의 종류는 다음과 같습니다.
|
항목 |
설명 |
|---|---|
|
Workcell I/O |
Workcell Item의 통신 방법을 선택 하고 신호를 추가 하는 항목 입니다. |
|
DRL Component |
WCI Action 기능을 사용하기 위해 DRL을 작성 할 수 있는 Component 입니다. |
|
UI Component |
DRL에 적용되어 있는 Parameter와 연결 할 수 있는 UI Component 입니다. |
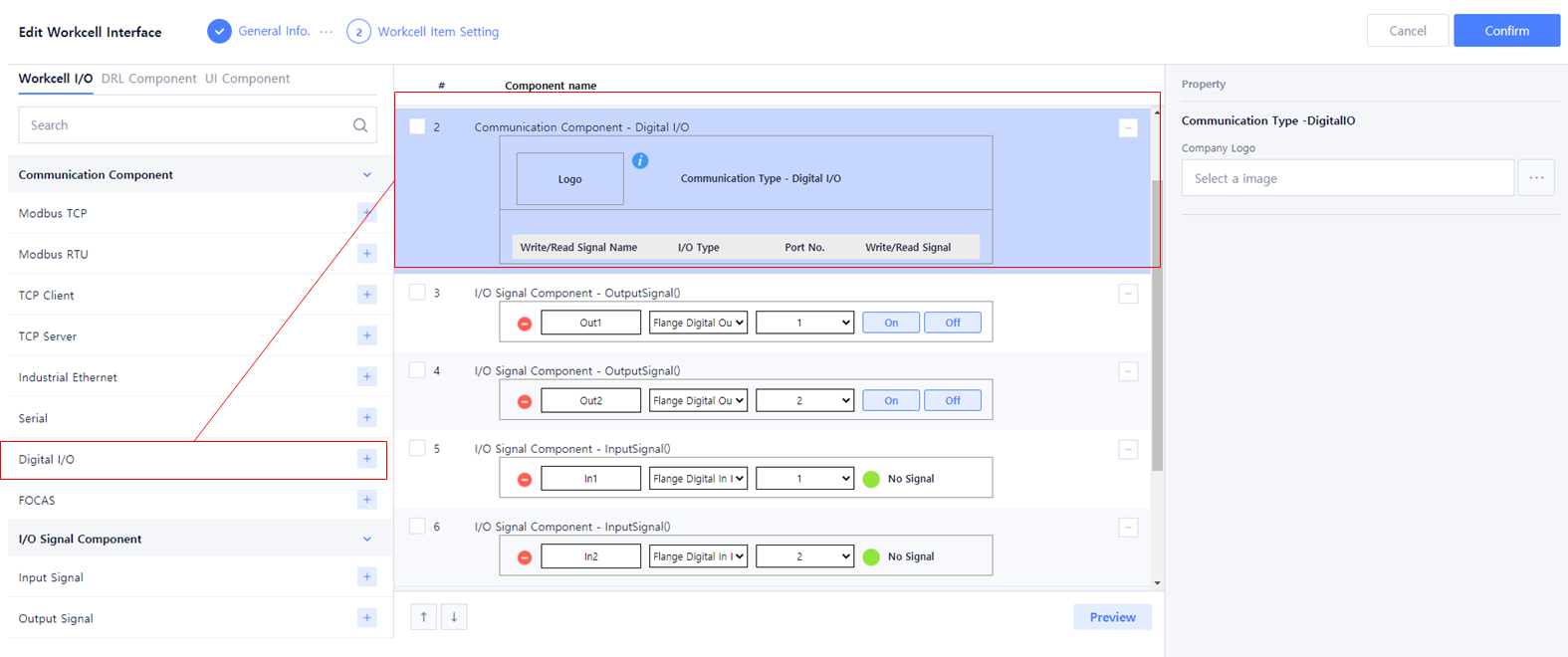
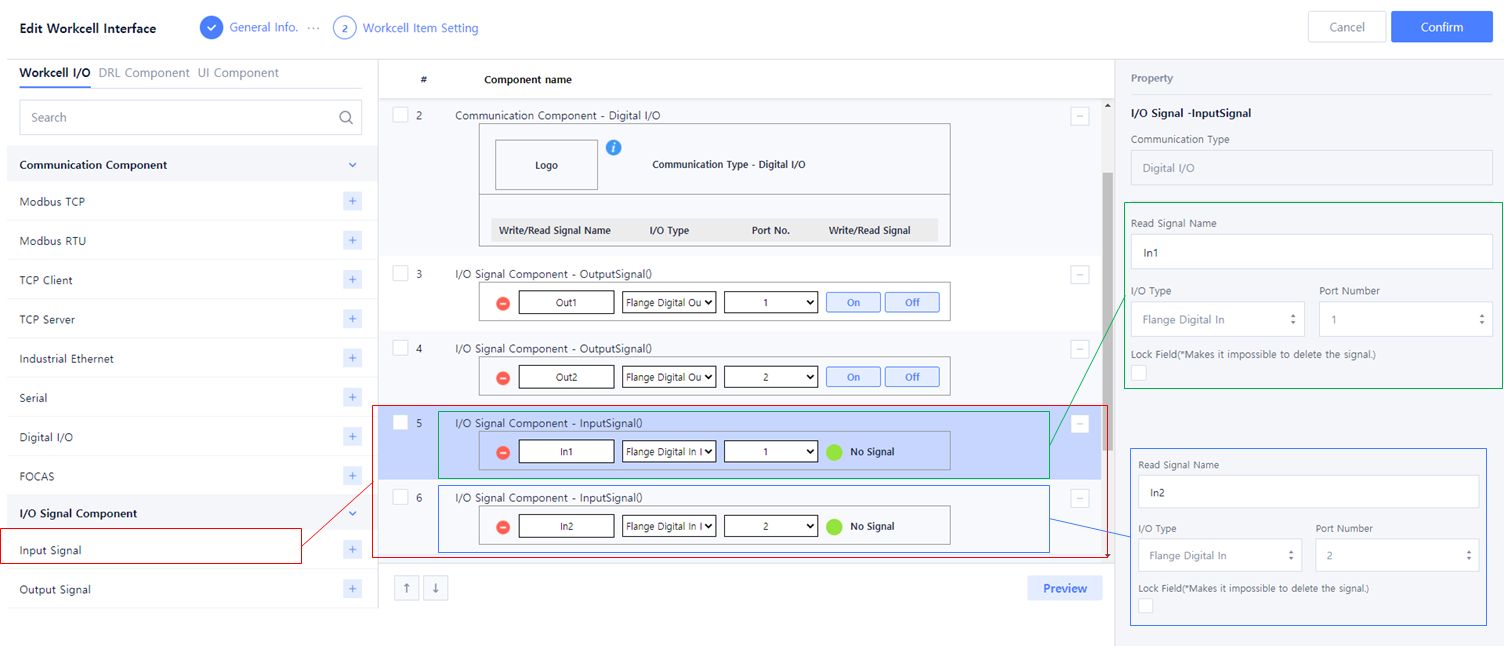
Workcell I/O Component
WCI 설정 시, 반드시 I/O Component를 추가하십시오. 현재 버전에서는 I/O Component 없이 생성된 WCI는 정상적으로 동작하지 않습니다.
-
통신 모듈 중 Digital I/O 선택하십시오.
-
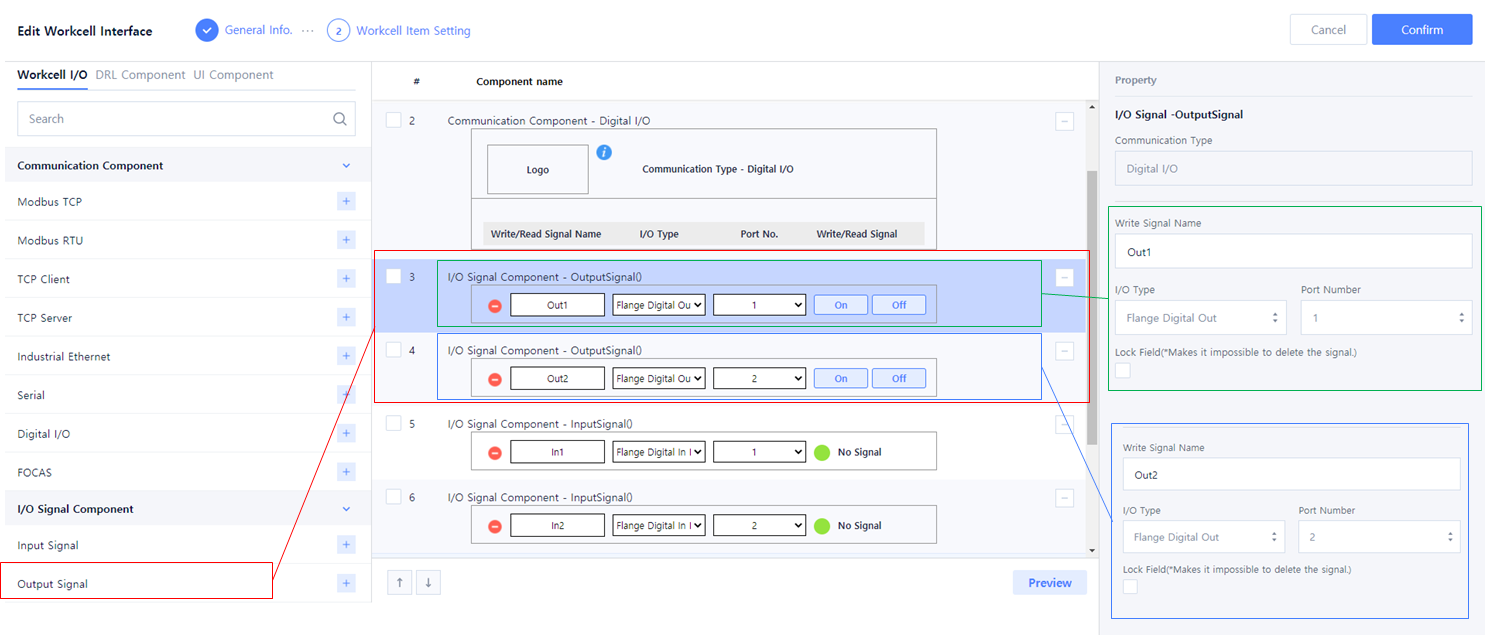
I/O Signal Component의 Output Signal을 두 개를 추가 하십시오.
-
첫 번째 Output Signal의 Property에 아래 값을 입력하십시오.
-
Write Signal Name: Out1
-
I/O Type: Flange Digital Out
-
Port Number: 1
-
-
두 번째 Output Signal의 Property에 아래 값을 입력하십시오.
-
Write Signal Name: Out2
-
I/O Type: Flange Digital Out
-
Port Number: 2
-
-
-
I/O Signal Component의 Input Signal을 두 개를 추가 하십시오.
-
첫 번째 Input Signal의 Property에 아래 값을 입력하십시오.
-
Write Signal Name: In1
-
I/O Type: Flange Digital In
-
Port Number: 1
-
-
두 번째 Input Signal의 Property에 아래 값을 입력하십시오.
-
Write Signal Name: In2
-
I/O Type: Flange Digital In
-
Port Number: 2
-
-
DRL Component
Workcell Item Writer에서 선택한 카테고리에 따라 기본 'Mandatory Workcell Item Action'이 설정됩니다. Mandatory WCI Action에서는 WCI의 필수 기능을 정의합니다.
-
Mandatory Workcell Item Action (Grasp)
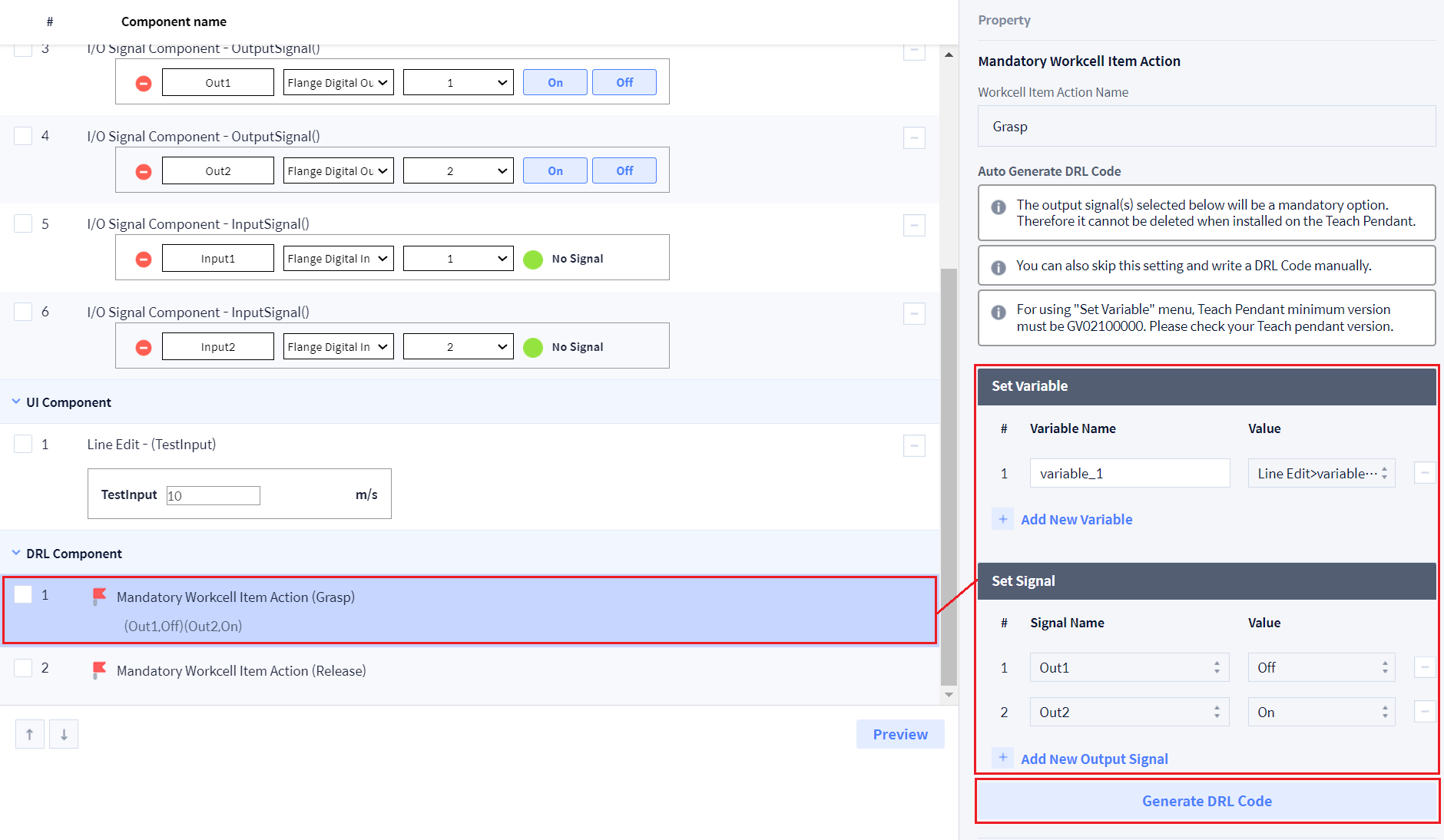
Output1의 Output Value: OFFOutput2의 Output Value: ON"variable_1" 변수 추가: 변수 값은 Line Edit(TestInput) 입력 값이 할당됨.'Set Output Signal'의 값 그리고 변수들을 설정한 후 'Generate DRL Code'를 클릭하면 해당 신호 출력에 해당하는 DRL코드가 생성됩니다. 위 예제의 Grasp 기능 DRL 코드는 아래와 같이 생성됩니다.Grasp(Out2,Out1) # CopyRight 2021 by DoosanRobotics # All rights reserved. #!Notice! #1. The "Out2,Out1" input parameter is processed in Teach Pendant. It is advised not to change or delete. #2. Use the name set in "Workcell Item Action Name" as the function name #3. Just define the function here. Function call is automatically called from Teach Pendant. def Grasp(Out2,Out1,variable_1): set_tool_digital_output(Out2["portNo"],0) set_tool_digital_output(Out1["portNo"],1) -
Mandatory Workcell Item Action (Release)
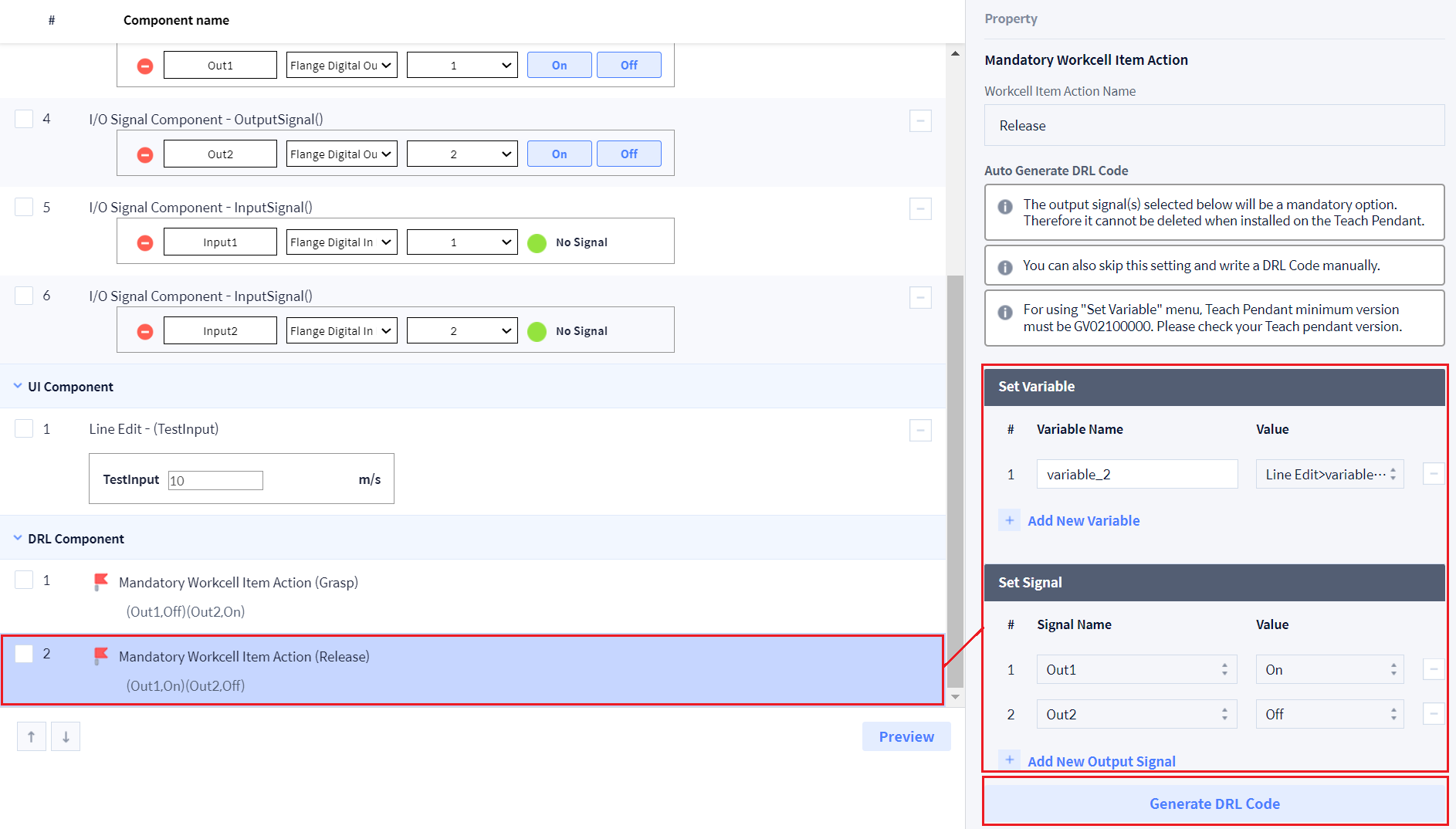
Output1의 Output Value: OFFOutput2의 Output Value: ON"variable_2" 변수 추가: 변수 값은 Line Edit(TestInput) 입력 값이 할당됨.'Set Output Signal'의 값 그리고 변수들을 설정한 후 'Generate DRL Code'를 클릭하면 해당 신호 출력에 해당하는 DRL코드가 생성됩니다. 위 예제의 Release기능 DRL 코드는 아래와 같이 생성됩니다.Release(Out1,Out2) # CopyRight 2021 by DoosanRobotics # All rights reserved. #!Notice! #1. The "Out1,Out2" input parameter is processed in Teach Pendant. It is advised not to change or delete. #2. Use the name set in "Workcell Item Action Name" as the function name #3. Just define the function here. Function call is automatically called from Teach Pendant. def Release(Out1,Out2,variable_2): set_tool_digital_output(Out1["portNo"],0) set_tool_digital_output(Out2["portNo"],1) -
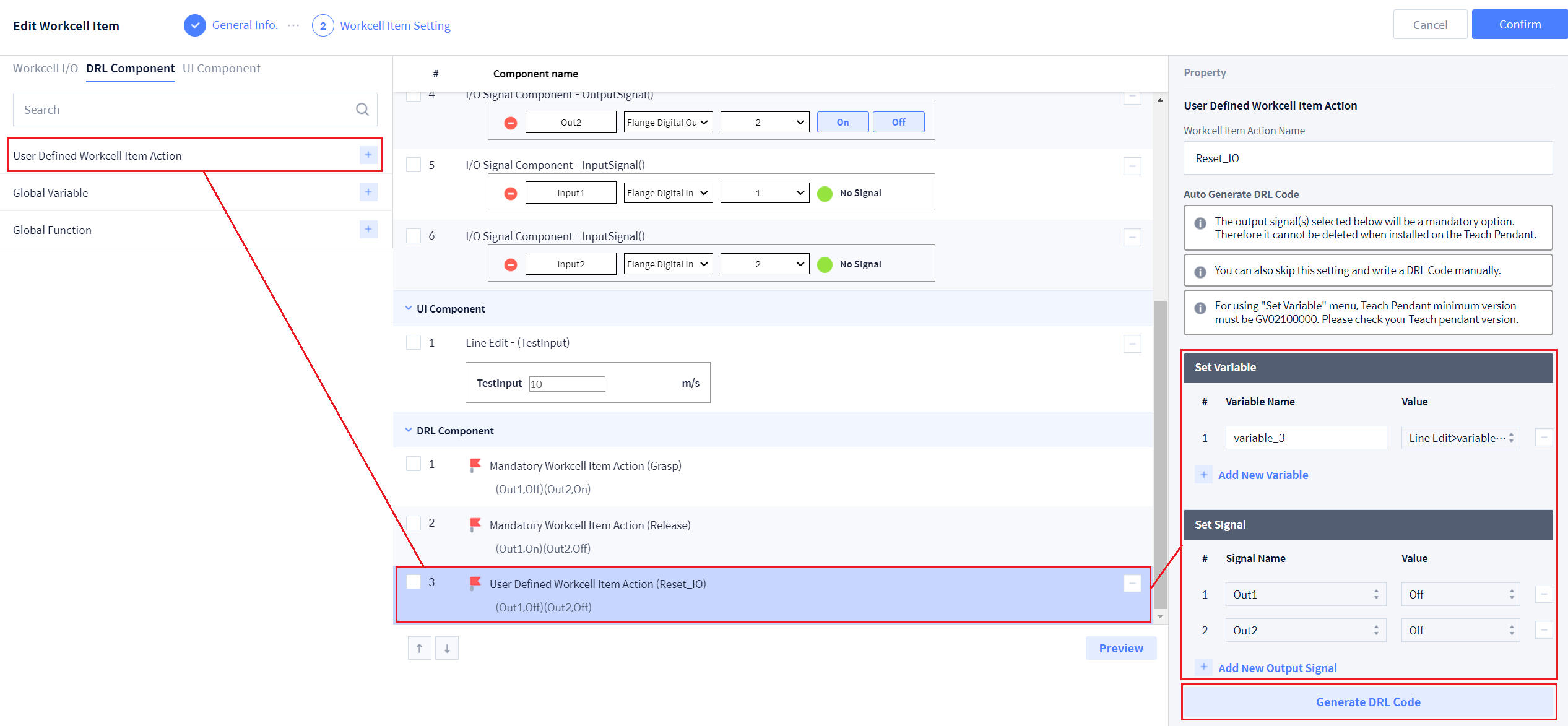
User Defined WCI Action(Reset_IO)
옵션 기능으로 Reset_IO를 구현할 수 있습니다. 기본적으로 추가되는 Action 이외에 별도의 Action을 추가하기 위해서 'User Defined WCI Action'을 추가하십시오.
-
Output1의 Output Value: OFF
-
Output2의 Output Value: OFF
-
"variable_3" 변수 추가: 변수 값은 Line Edit(TestInput) 입력 값이 할당됨.
-
'Set Output Signal'의 값 그리고 변수들을 설정한 후 'Generate DRL Code'를 클릭하면 해당 신호 출력에 해당하는 DRL코드가 생성됩니다. 위 예제의 Release기능 DRL 코드는 아래와 같이 생성됩니다.
Python# CopyRight 2021 by DoosanRobotics # All rights reserved. #!Notice! #1. The "Out1,Out2" input parameter is processed in Teach Pendant. It is advised not to change or delete. #2. Use the name set in "Workcell Item Action Name" as the function name #3. Just define the function here. Function call is automatically called from Teach Pendant. def Reset_IO(Out1,Out2,variable_3): set_tool_digital_output(Out1["portNo"],0) set_tool_digital_output(Out2["portNo"],0)
-