P 모델은 다른 로봇과 달리 4축이 없어 수동 모션 기능이 다르게 동작합니다.
팔레타이징 모드
P 모델을 위한 특별한 모드인 팔레타이징 모드를 설정할 수 있는 기능을 제공합니다.
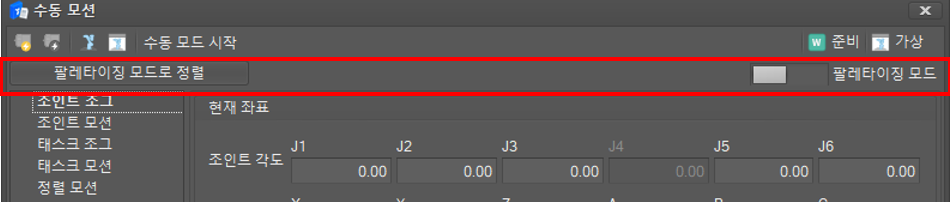
팔레타이징 모드는 Base의 Z축과 Flange의 Z축이 정렬되어 있어야만 사용할 수 있습니다.
Base의 Z축과 Flange의 Z축을 정렬 시키는 기능인 팔레타이징 모드로 정렬 기능을 제공합니다.
조인트 조그
P 모델은 4축이 없어 4축 조그는 제공하지 않습니다.
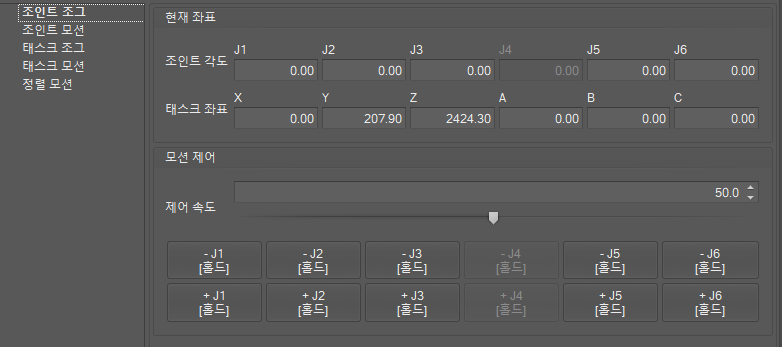
팔레타이징 모드에서는 Flange의 정렬을 흐트러뜨리지 않기 위해 1축과 6축만 동작할 수 있습니다.
태스크 조그
P 모델은 Rx, Ry, Rz 회전 조그 기능 대신 Tilt, Rot 회전 기능을 제공합니다.
Tilt 회전은 5축의 회전 중심으로 TCP를 회전 시킵니다.
Rot 회전은 6축의 회전 중심으로 TCP를 회전 시킵니다.
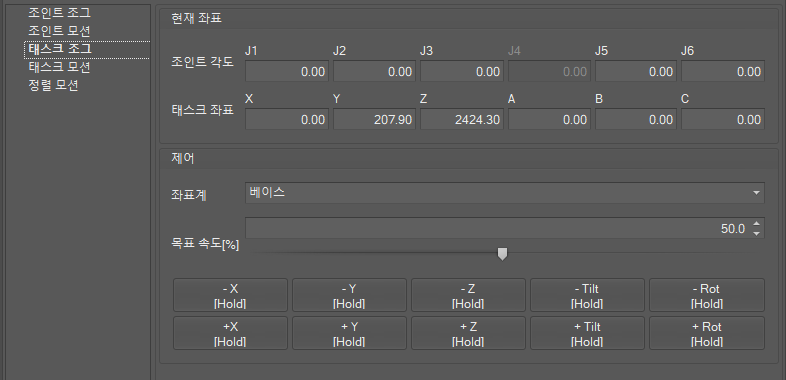
팔레타이징 모드에서는 Tilt 회전을 사용할 수 없는 대신 위치 조그 동작을 할 때 현재 TCP의 회전 방향을 보장합니다.
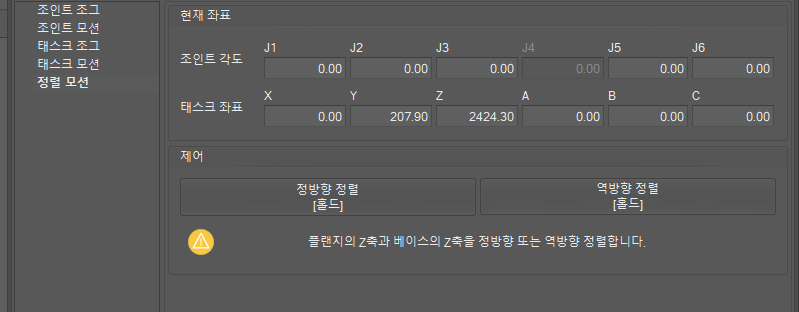
정렬 동작
P 모델은 Base의 Z축과 Flange의 Z축이 정렬 만을 할 수 있습니다.
따라서 정방향 정렬, 역방향 정렬 기능만 제공합니다.