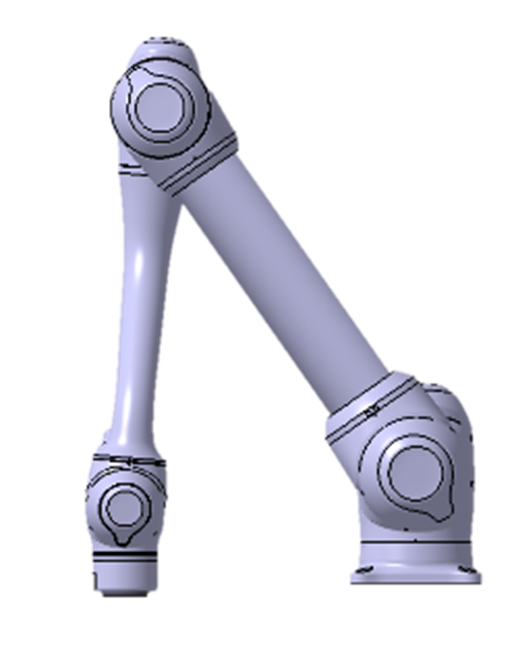
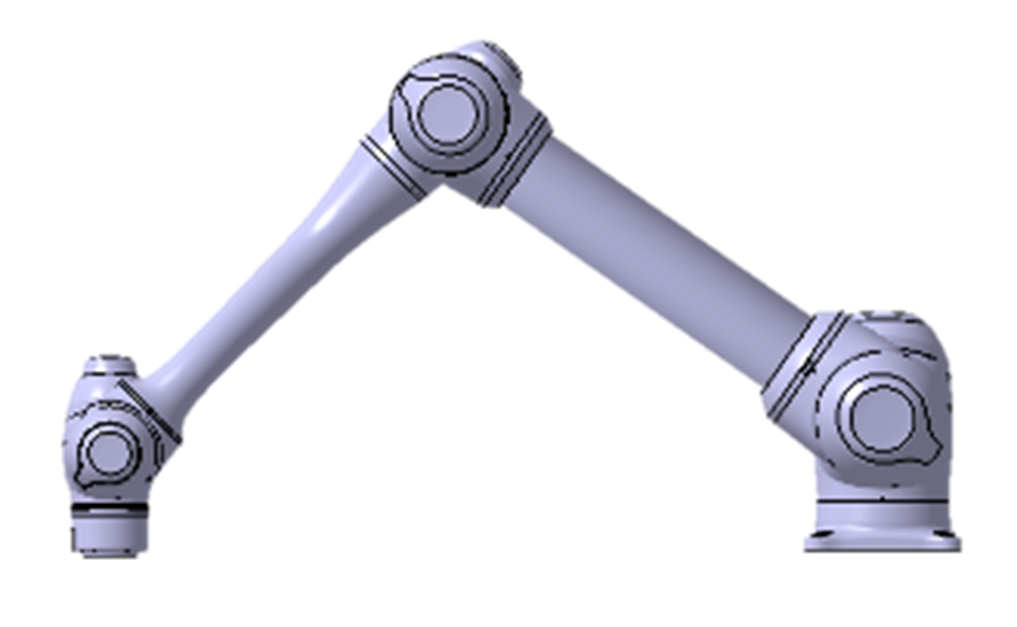
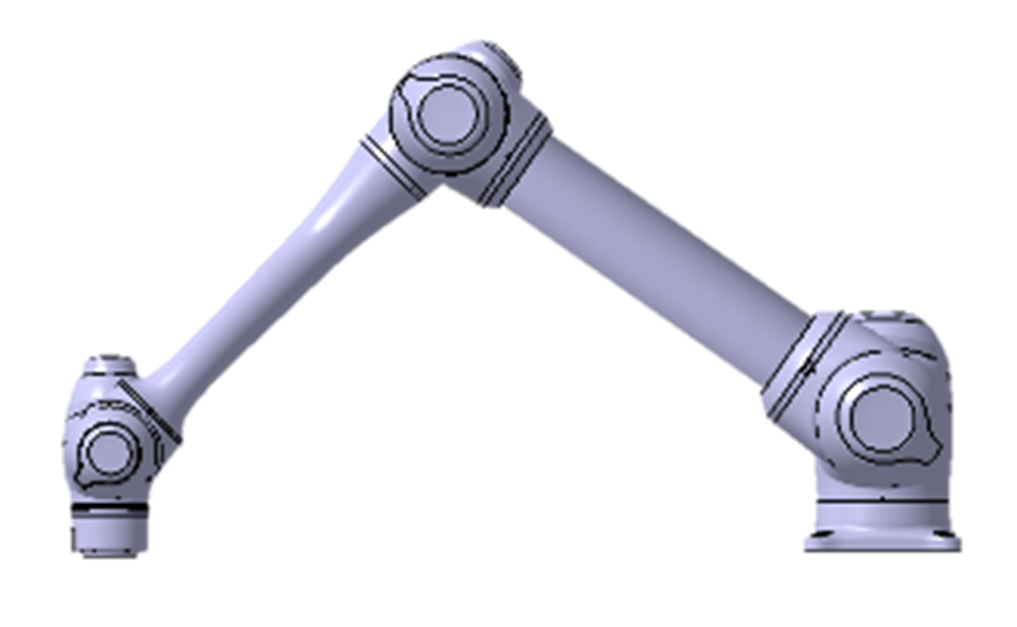
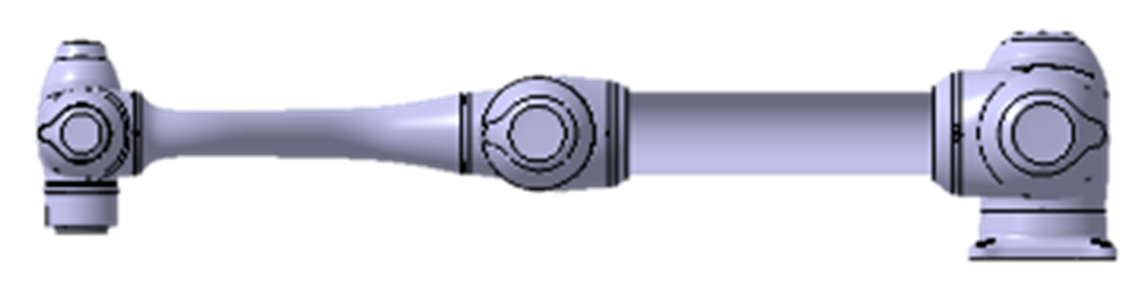
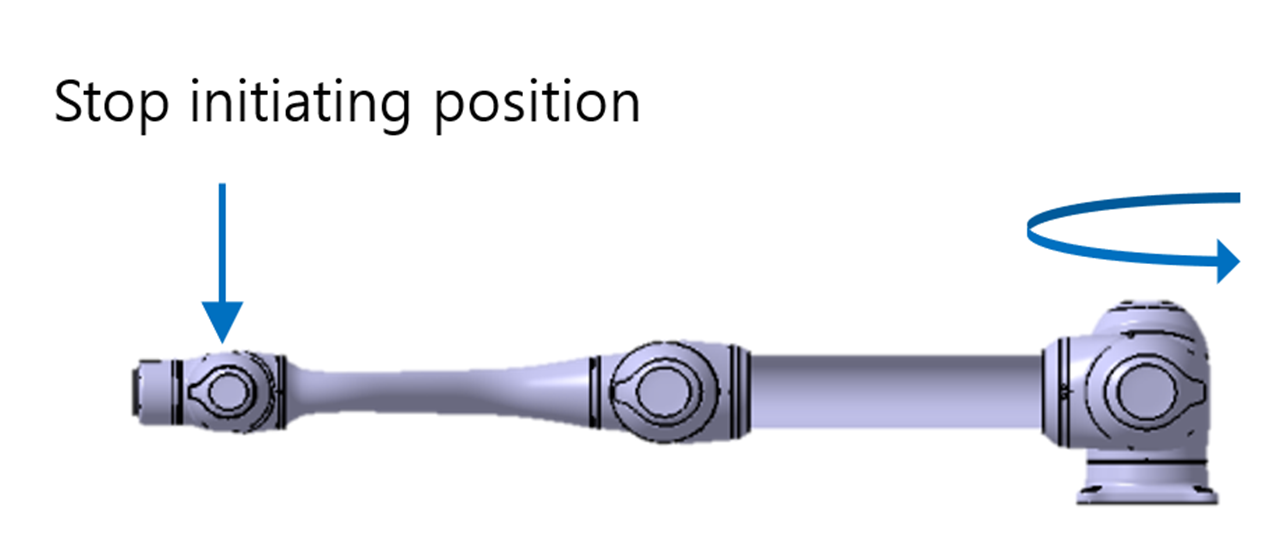
Měření kloubu 1 se provádí s osou otáčení kolmo k zemi a během vodorovného pohybu.
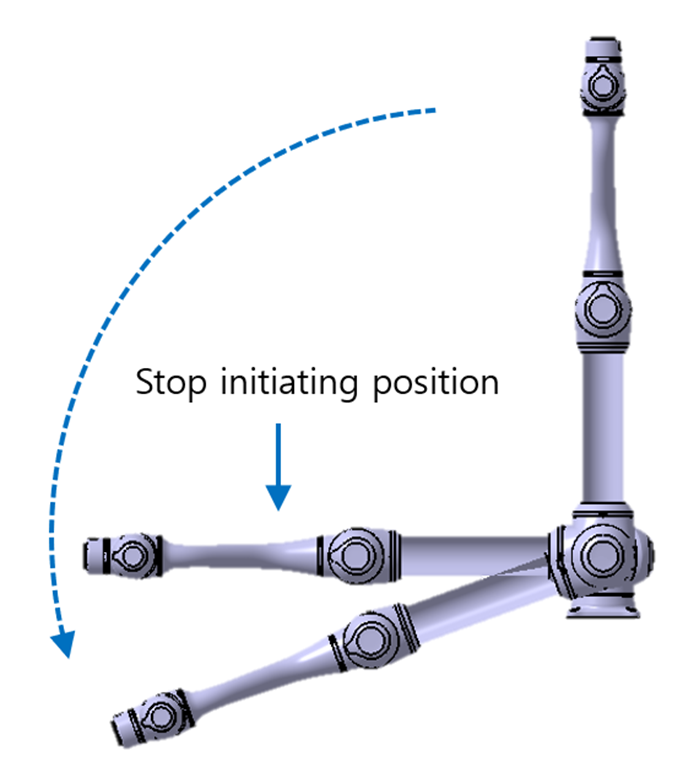
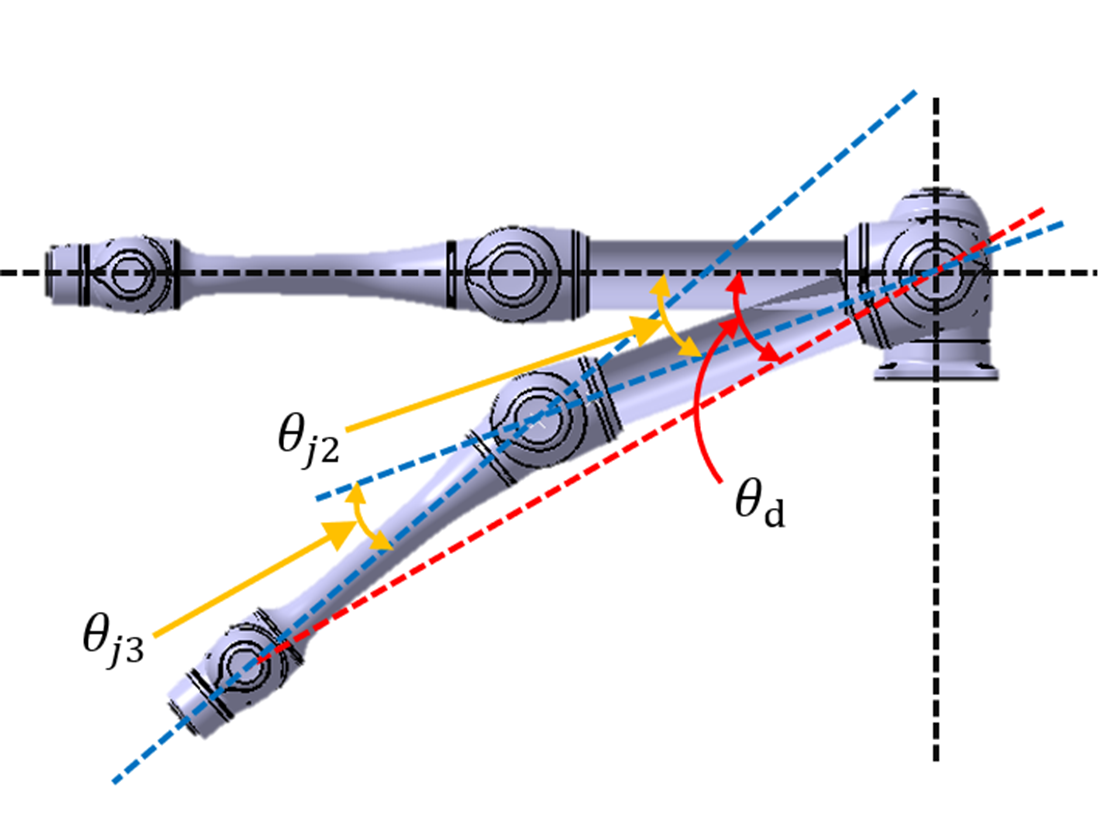
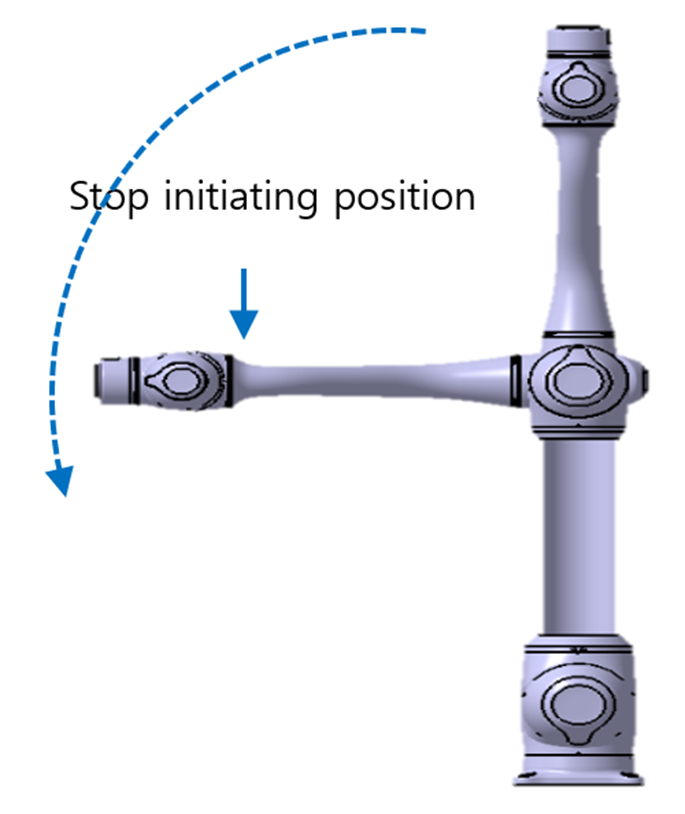
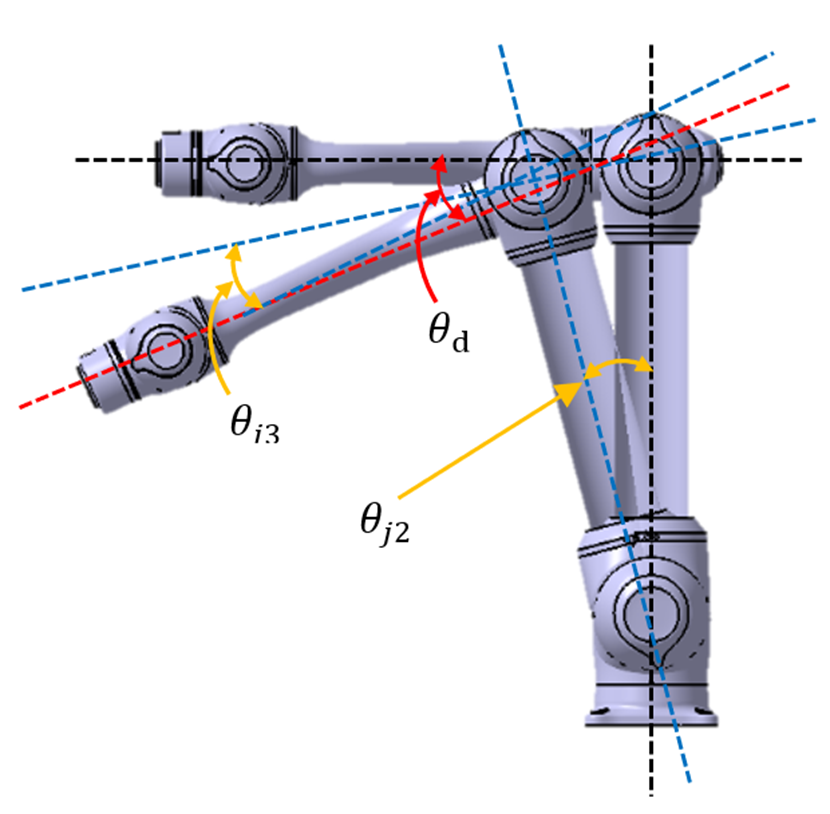
Měření kloubu 2 a kloubu 3 se provádějí s osou otáčení rovnoběžně s podlahou a při zastavení robota pohybem dolů kolmým k zemi.
Poznámka
Měření jsou výsledkem toho nejhoršího případu. Měření se může v závislosti na okolnostech lišit
Pozice při 33%, 66% a 100% dosahu
|
|
Joint 1 |
Joint 2 |
Joint 3 |
|
100% extension Stop category 0 |
|
|
|
|
33% extension Stop category 1 |
|
|
- |
|
66% extension Stop category 1 |
|
|
- |
|
100% extension Stop category 1 |
|
|
|
Pozice, když se aktivuje zastavení a naměřený úhel (θd)
|
|
Pozice, když se aktivuje zastavení |
Naměřený úhel |
|
Joint1
|
|
No slip, |
|
Joint2 |
|
|
|
Joint3 |
|
|