Der Roboter kann in einem beliebigen Winkel installiert werden. Um die Installationsstellung des Roboters zu konfigurieren, die Schaltfläche 
|
Nr. |
Element |
Beschreibung |
|---|---|---|
|
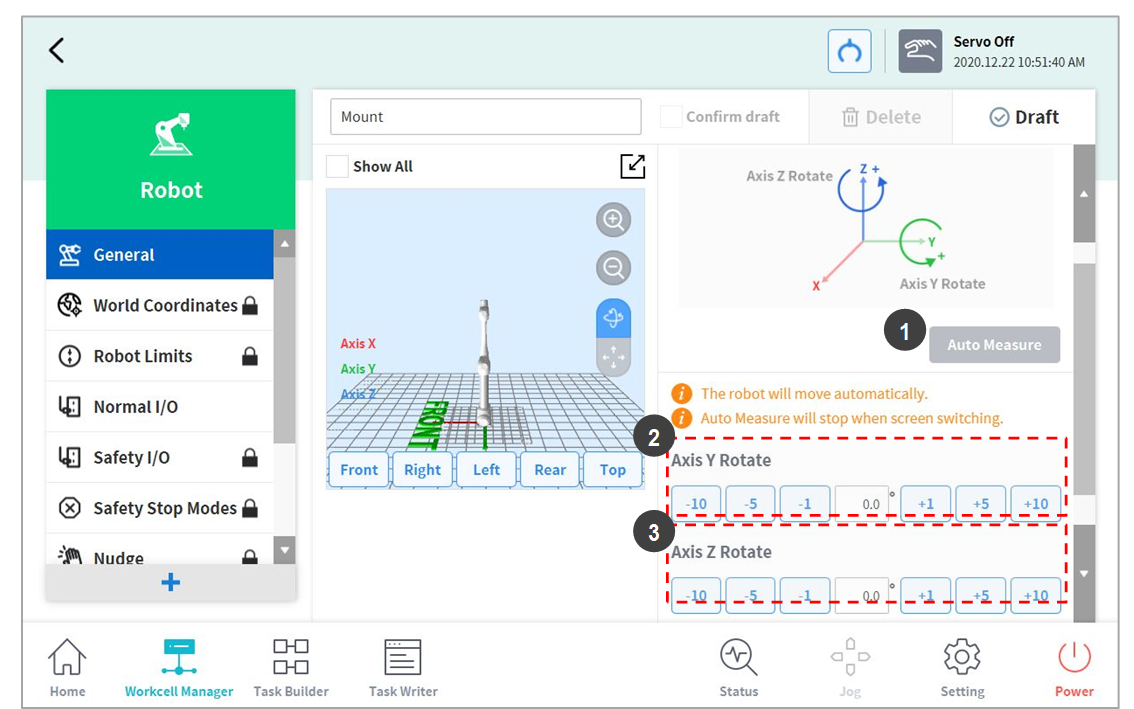
1 |
Auto Calculate |
Berechnet automatisch den Installationswinkel des Roboters. |
|
2 |
Y-axis Rotation Setting |
Den Winkel der Y-Achse des Roboters während der Installation eingeben. |
|
3 |
Z-axis Rotation Setting |
Den Winkel der Z-Achse des Roboters während der Installation eingeben. |
Die Schaltfläche Auto Calculate (Automatisch berechnen) antippen, um den Neigungswert automatisch zu berechnen. Die Funktion für automatische Berechnung der Installationsstellung ist anwendbar, wenn der Roboter um mehr als 5 Grad von der Waagerechten geneigt steht. Die Funktion für Automatische Berechnung der Installationsstellung des Roboters ermöglicht eine einfache Konfiguration der für direktes Einlernen erforderlichen Installationsstellung und der Funktionen Kraftregelung und Nachgiebigkeitssteuerung, ohne exakte Werte des Installationswinkels eingeben zu müssen, aber die automatisch von der Einstellung der Roboterstellung berechnete absolute Positionsgenauigkeit kann dann unterhalb jener der exakt gemessenen Werte liegen.