Der Roboter wird zur Standardausgangsposition oder zur benutzerdefinierten Ausgangsposition bewegt, die in Settings (Einstellungen) im Hauptmenü konfiguriert wurde.
-
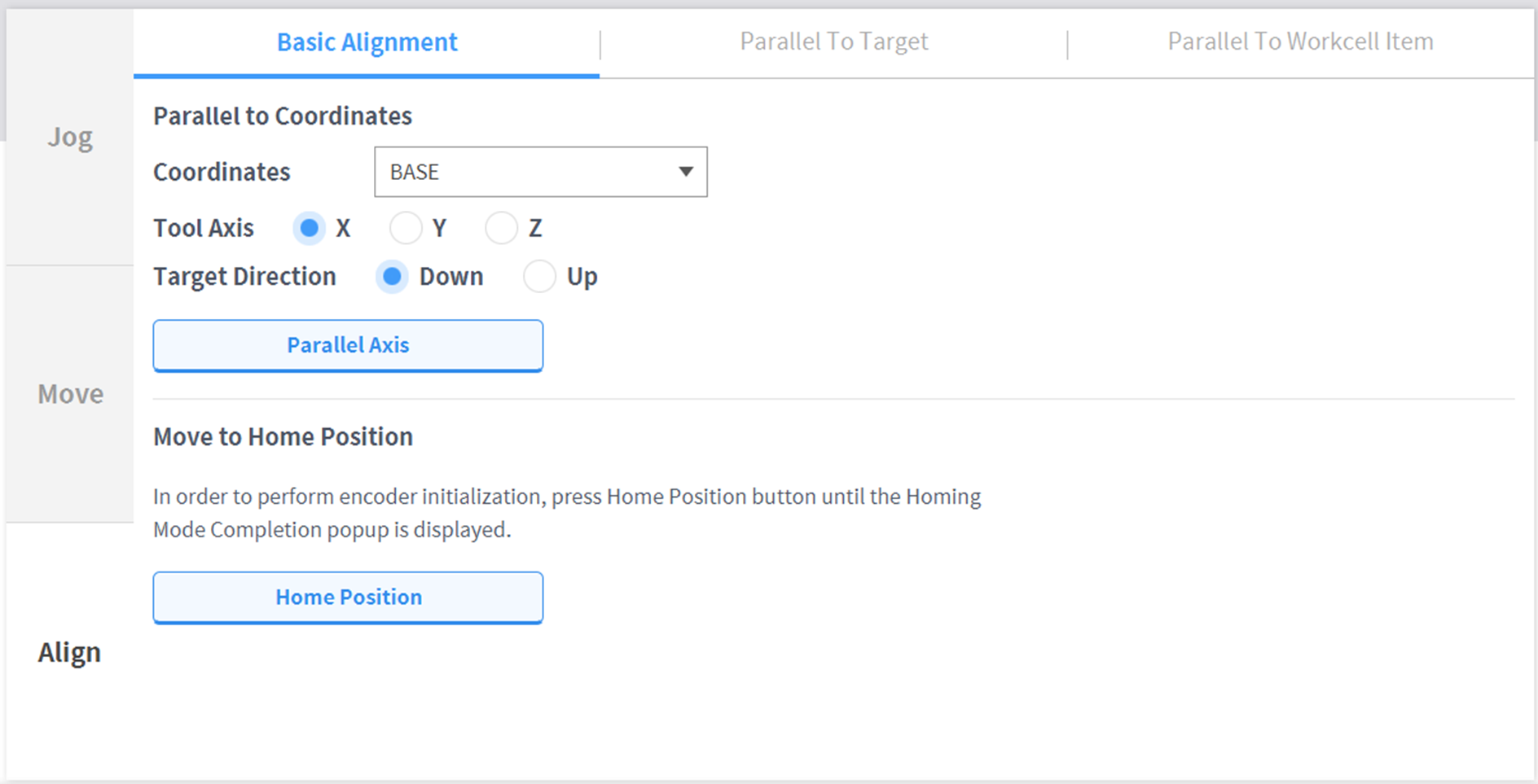
Registerkarte Align (Ausrichten) und dann die Registerkarte Basic Alignment (Grundausrichtung) auswählen.
-
Die Schaltfläche Home Position (Ausgangsposition) antippen und halten, um den Roboter zur Ausgangsposition zu bewegen.
Achtung
-
Wenn ein Roboter oder ein Gelenk eines Roboters ausgetauscht wird, muss die Benutzer-Ausgangsposition mithilfe des Programmierhandgeräts zurückgesetzt werden.
-
Wenn Sie eine Sicherung/Wiederherstellung durchführen, müssen Sie die Benutzer-Ausgangsposition auf dem Programmierhandgerät zurücksetzen.
-
Die Einstellung der Benutzer-Ausgangsposition von DART Studio wird nicht auf dem Programmierhandgerät wiedergegeben. Wenn die Benutzer-Ausgangsposition mithilfe von DART Studio eingestellt und dann mit dem Programmierhandgerät verwendet wird, muss die Benutzer-Ausgangsposition zurückgesetzt werden.