Mit „Jog+“ können Sie die Verfahrfunktion gleichzeitig zur Durchführung einer anderen Arbeit verwenden.
Dies kann verwendet werden, wenn während des Roboter-Teachings eine präzise Bewegung zum Zielpunkt erforderlich ist. Jog Plus kann wie folgt aktiviert werden.
-
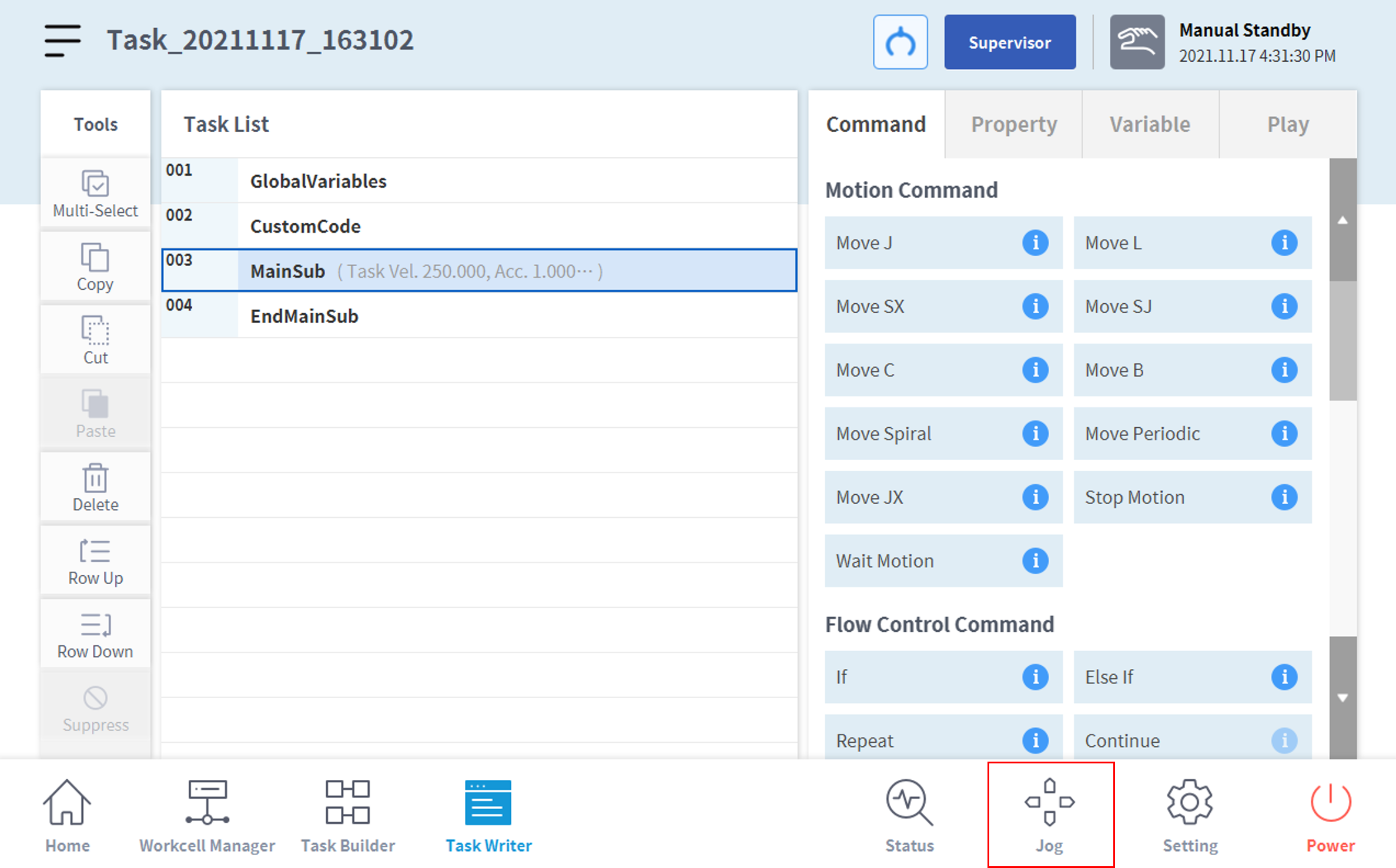
Drücken Sie im Hauptmenü am unteren Bildschirmrand die Jog-Taste länger als 1 Sekunde.
-
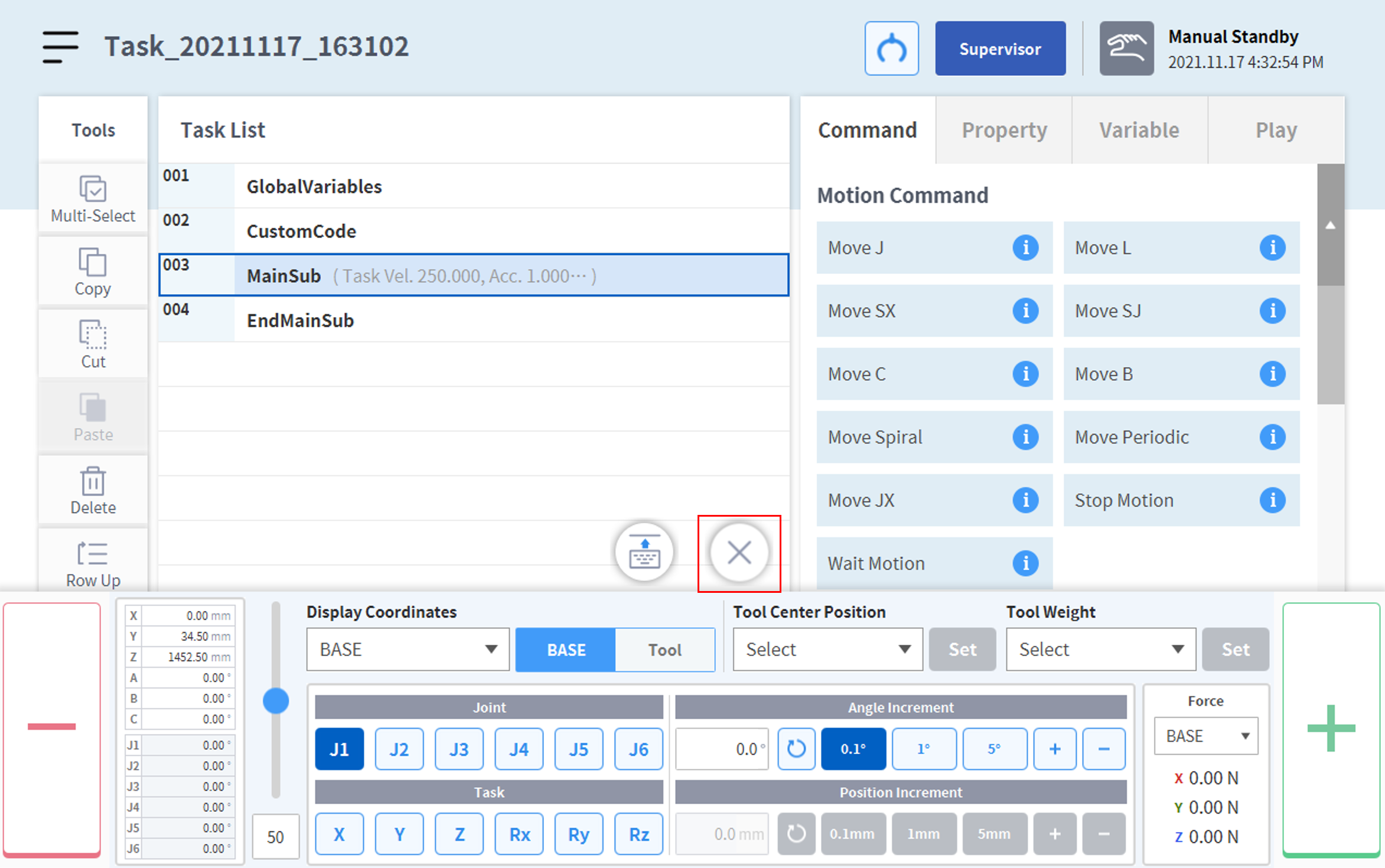
Der Jog Plus-Bildschirm wird aktiviert.
-
Jog Plus kann durch Drücken der „X“-Taste deaktiviert werden.
|
Nr. |
Element |
Beschreibung |
|---|---|---|
|
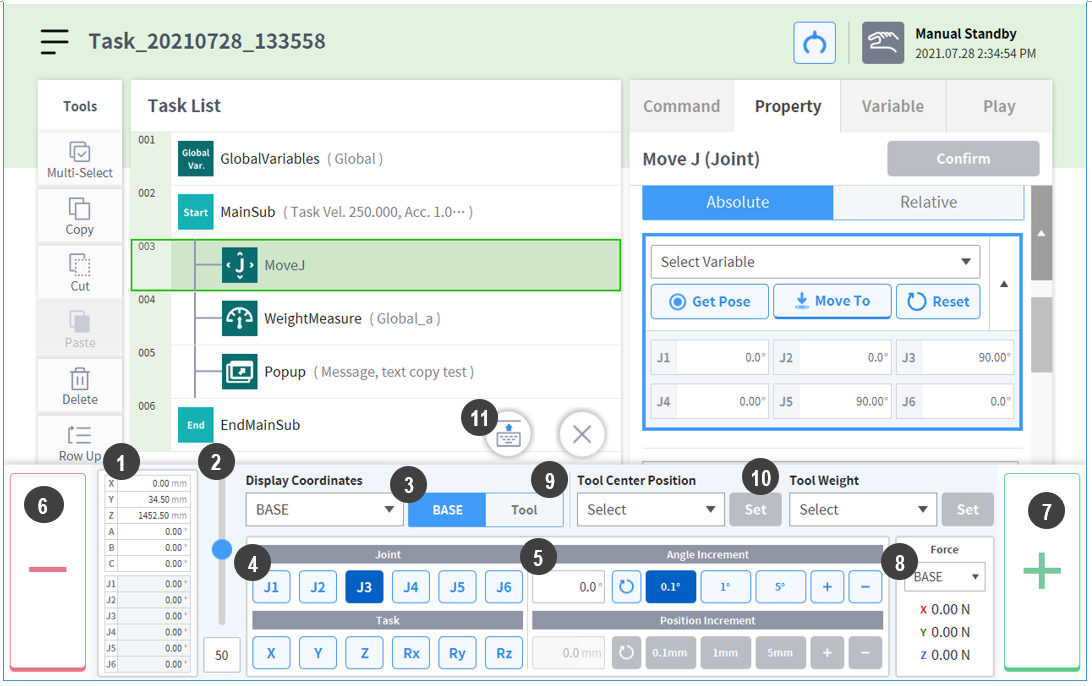
1 |
Current robot pose |
Zeigt die Roboterstellung basierend auf den festgelegten Anzeigekoordinaten an. |
|
2 |
Manual Mode Speed |
Konfiguriert die Geschwindigkeit der Roboterbewegung in der manuellen Betriebsart. Die Geschwindigkeit kann durch Ziehen des Zeigers am Schieber angepasst werden. Falls sich der Zeiger des Schiebers bei 100 % befindet, so beträgt die zugehörige maximale Gelenkgeschwindigkeit auf der Registerkarte „Jog“ (Verfahren) 30 Grad/Sek. und die maximale Arbeitsgeschwindigkeit der Aufgabe 250 mm/Sek. Diese Geschwindigkeit beeinflusst die Geschwindigkeit, welche von den Tasten für „Jog“ (Verfahren) und Bewegung gesteuert werden. |
|
3 |
Reference Point Setting |
Konfiguriert den Bezugspunkt für die Ausrichtung der Aufgabenkoordinate. „Base“ (Fuß): Konfiguriert die Aufgabenkoordinate basierend auf dem Roboterfuß. World: Die Aufgabenkoordinaten werden basierend auf den festgelegten World-Koordinaten festgelegt. „Tool“ (Werkzeug): Konfiguriert die Aufgabenkoordinate basierend auf dem Werkzeug, das am Ende des sechsachsigen Roboters installiert ist. |
|
4 |
Select Axis |
Wählt die Achse für die Bewegung aus. Registerkarte Joint (Gelenk): Eine Achse von J1 bis J6 auswählen. Registerkarte Task (Aufgabe): Eine Achse von X bis Rz auswählen. |
|
5 |
Select Increment |
Ermöglicht die Eingabe einer Zahl für das Ausmaß der Bewegung der ausgewählten Achse. |
|
6 |
Move – Button |
Bei gedrückter Taste bewegt sich die ausgewählte Achse in negativer Richtung entsprechend der Inkrementposition. |
|
7 |
Move – Button |
Bei gedrückter Taste bewegt sich die ausgewählte Achse in positiver Richtung entsprechend der Inkrementposition. |
|
8 |
Force Monitoring |
Zeigt die auftretende äußere Kraft basierend auf dem ausgewählten Koordinatensystem an. |
|
9 |
TCP Setting: |
Dient der Einrichtung des TCP. |
|
10 |
Tool Weight Indicator |
Dient der Einrichtung des Werkzeuggewichts. |
|
11 |
Change Jog+ location |
Ändert die Jog+-Position in den oberen oder unteren Rand des Bildschirms. |