Das Robotersystem kann auf eine bestimmte Version zurückgesetzt werden, die der Benutzer auswählt.
-
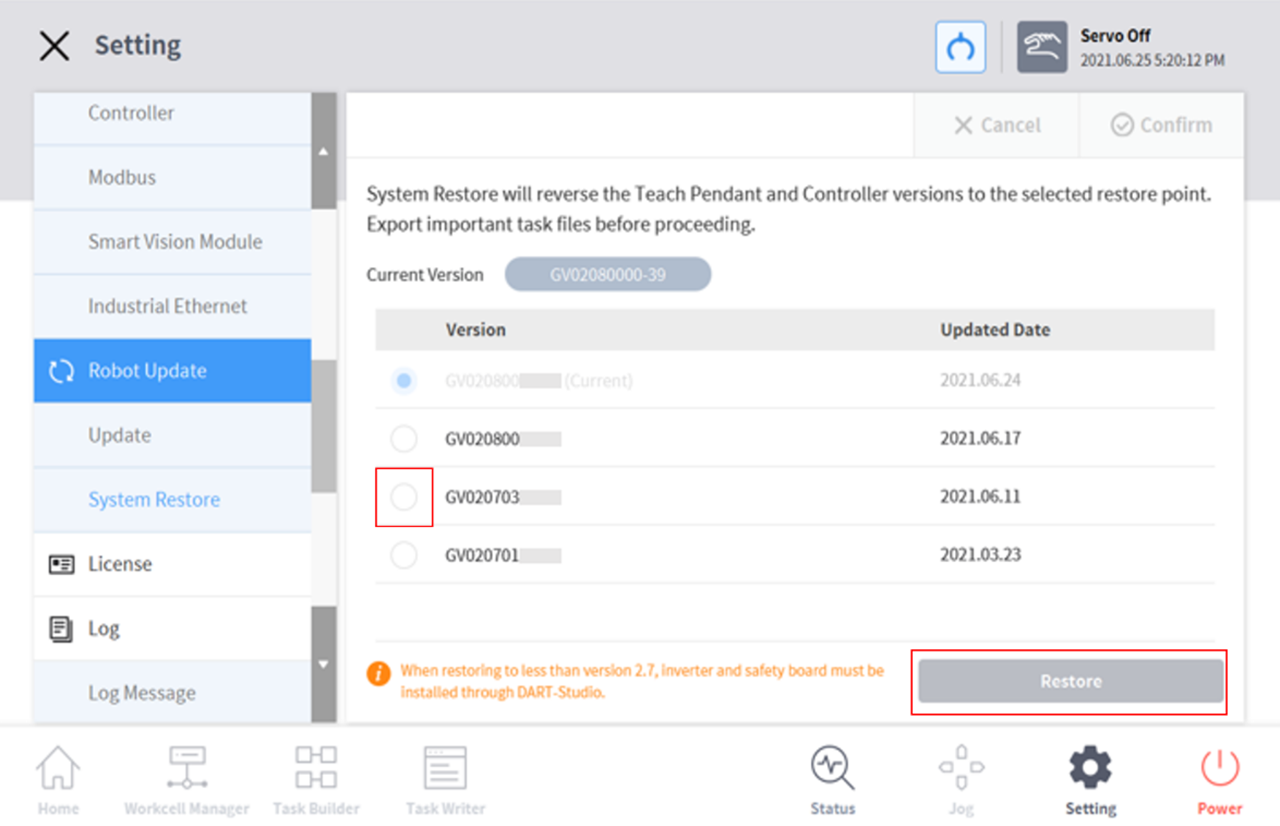
Im Einstellungsmenü Robot Update > System Restore (Aktualisierung des Roboters > Systemwiederherstellung) auswählen.Die letzten fünf im Robotersystem installierten Versionen werden angezeigt.Das Optionsfeld der aktuellen Version ist aktiviert.
-
Optionsfeld der Version auswählen, die wiederhergestellt werden soll.Die Schaltfläche „Restore“ (Wiederherstellen) wird aktiviert.
-
Die Schaltfläche „Restore“ (Wiederherstellen) drücken.
-
System nach der Wiederherstellung neu starten.
Falls auf das System über Windows zugegriffen wird, so steht die Funktion für Wiederherstellung des Systems nicht zur Verfügung.
-
Wenn nach der Systemwiederherstellung bei einem Produkt der A-Serie eines der folgenden Probleme auftritt, müssen Sie eine Reibungskalibrierung durchführen (siehe Beschreibung in „Reibungskalibrierung“).
-
Ein Problem erschwert die Steuerung der direkten EinlernfunktionDas direkte Einlernen funktioniert nicht ordnungsgemäß, obwohl die Einstellungen für Werkzeuggewicht und Gewichtsmittelpunkt korrekt sind.Wenn sich der Roboter beim direkten Einlernen zu schnell bewegt oder zu viel Kraft anwendetWenn beim direkten Einlernen die Steuerung in eine bestimmte Richtung schwierig istWenn häufig eine Kollisionserkennung erfolgt und die Kollisionsempfindlichkeit auf die Standardeinstellung festgelegt ist
-
Wenn der Fehler „2.9015“ sporadisch im Bedientableau auftrittError 2.9015: The external force of the robot tip has exceeded the safe range. (Fehler 2.9015: Die von außen auf die Roboterspitze einwirkende Kraft hat den sicheren Bereich überschritten.)