Um den Roboter basierend auf Fußkoordinaten zu bewegen, wie folgt vorgehen:
-
Registerkarte Move (Bewegen) und dann die Registerkarte Task (Aufgabe) auswählen.
-
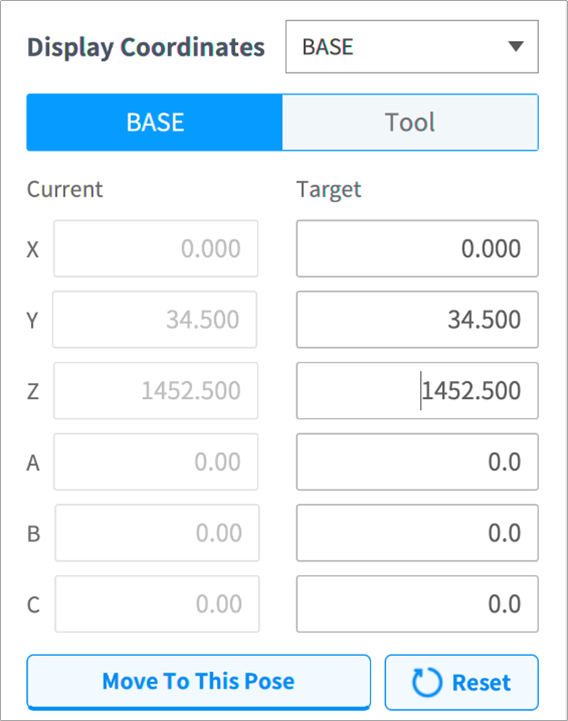
„Base“ (Basis) als Anzeigekoordinaten und dann die Registerkarte Base auswählen.
-
Stellung der Bewegung in Bezug auf den Fuß des Roboters konfigurieren.
-
Schaltfläche Move to Corresponding Pose (Bewegung zur entsprechenden Stellung) antippen und halten, um den Roboter zur festgelegten Koordinate zu bewegen.