Déplace le robot vers la position d'origine par défaut ou la position d'origine configurée par l'utilisateur dans la section Settings dans le menu principal.
-
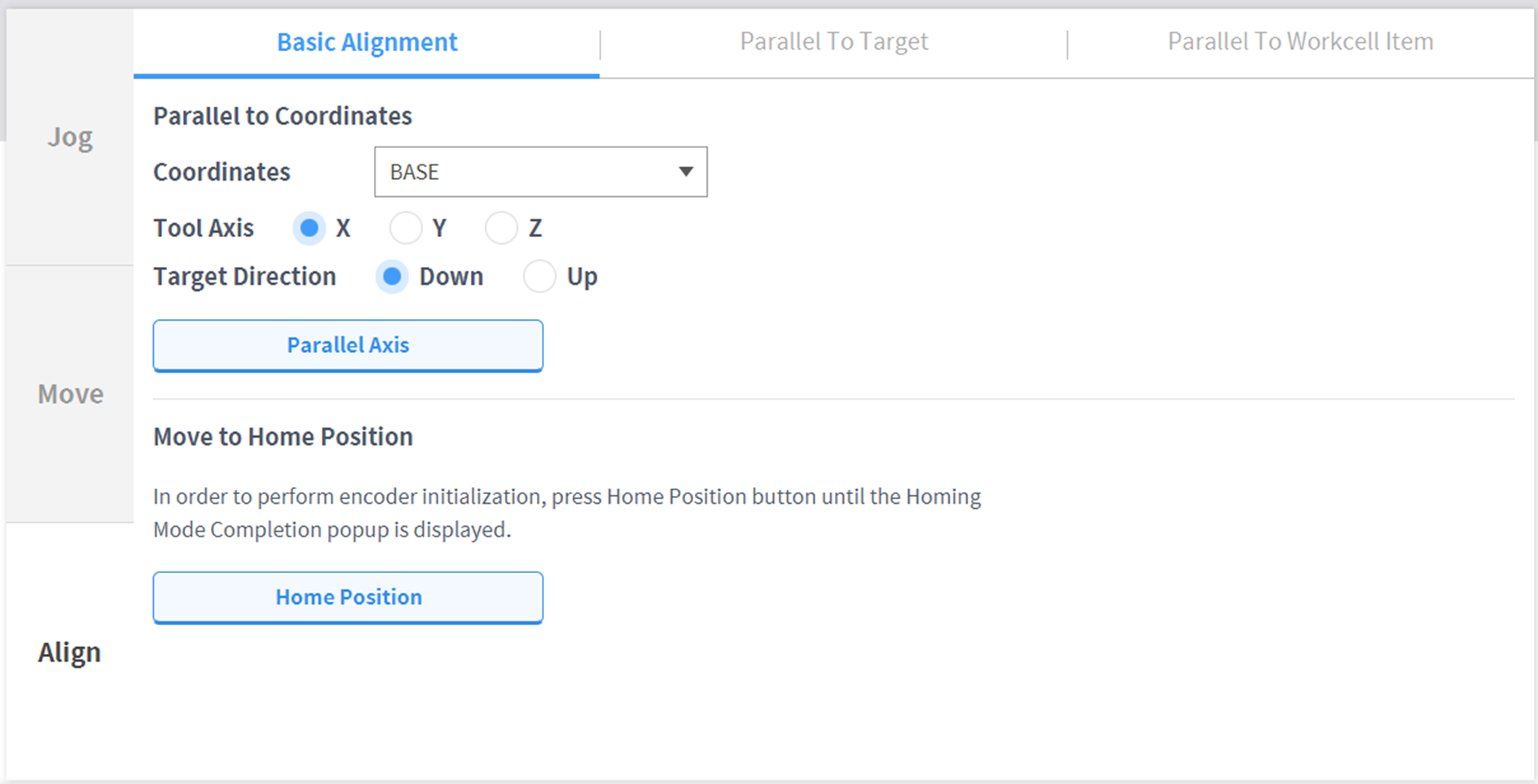
Sélectionnez l'onglet Align (Aligner) et sélectionnez l'onglet Basic Alignment (Alignement de base ).
-
Maintenez le bouton Home Position (Position d'origine) enfoncé pour déplacer le robot en position d'origine.
Attention
-
Lorsqu'un robot ou une articulation d'un robot est échangé, la position d'origine de l'utilisateur doit être réinitialisée à l'aide du pendentif d'apprentissage.
-
Lorsque vous effectuez une sauvegarde/restauration, vous devez réinitialiser la position d'origine de l'utilisateur sur le pendentif d'apprentissage.
-
Le paramètre de position d'origine de l'utilisateur de DART Studio n'est pas reflété sur le pendentif d'apprentissage. Si la position d'origine de l'utilisateur est définie à l'aide de DART Studio puis utilisée avec le pendentif d'apprentissage, la position d'origine de l'utilisateur doit être réinitialisée.