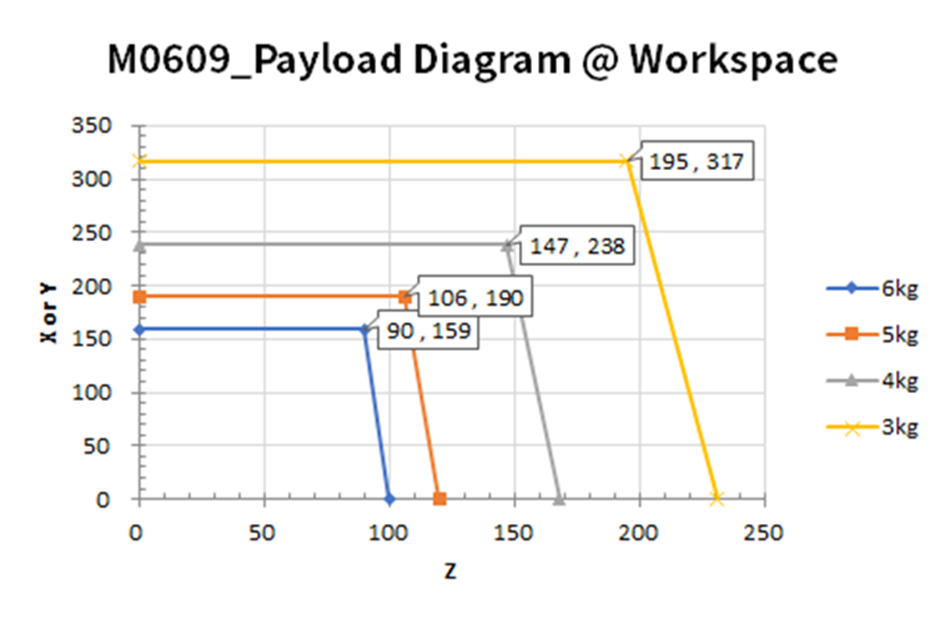
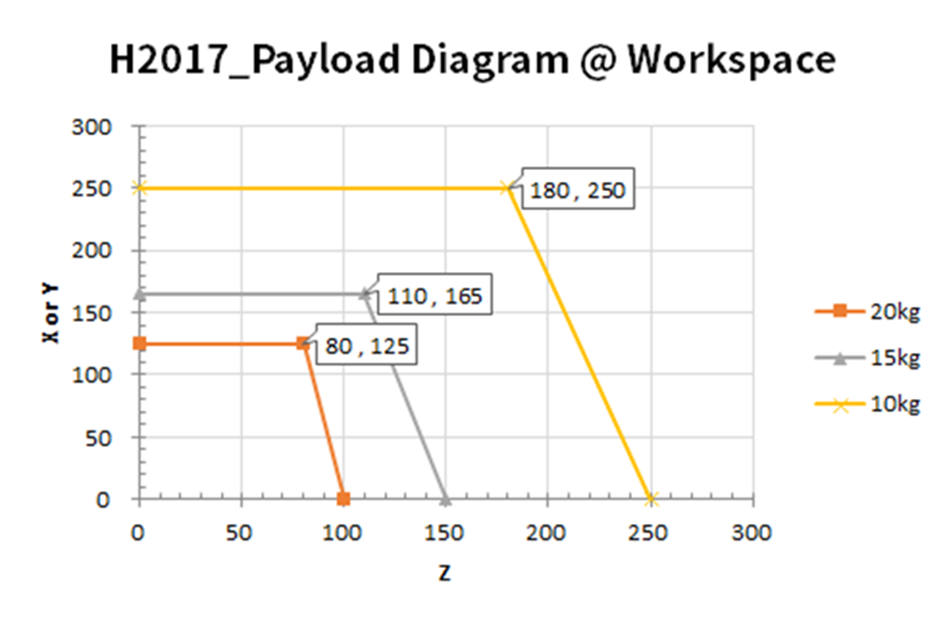
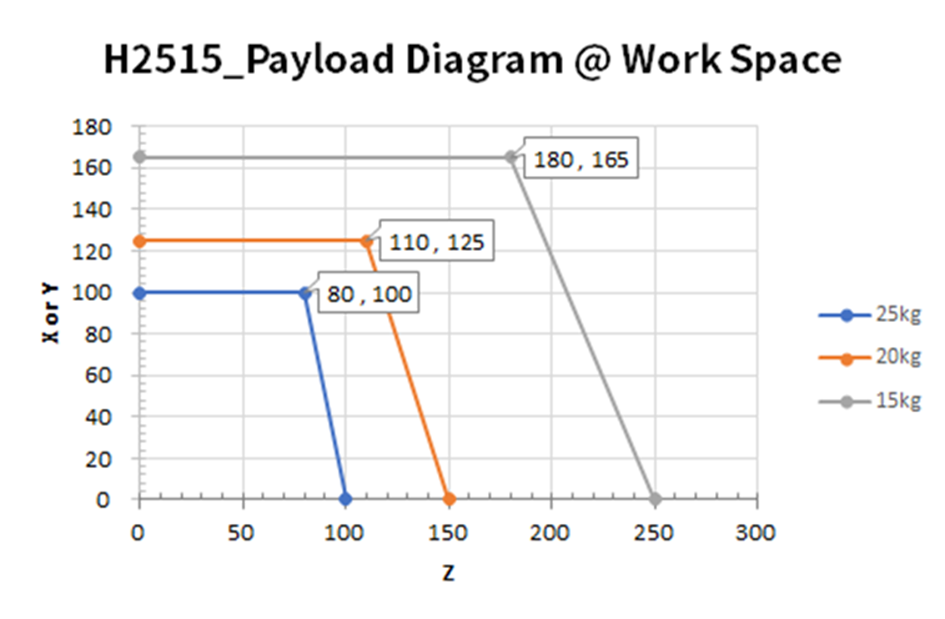
A robot működési terén belüli maximális hasznos terhe a súlyponttól való távolság függvényében változik. A távolságonkénti hasznos teher a következő:
A terhelési diagram kis szerszámterhelési térfogatot feltételez. Nagyobb térfogatú szerszámoknak nagyobb korlátozásaik vannak a szerszám súlypontja feletti hasznos terhet illetően, egyenlő súlyú, de kisebb térfogatú szerszámhoz képest, és ebben az esetben rezgés fordulhat elő.
M0609
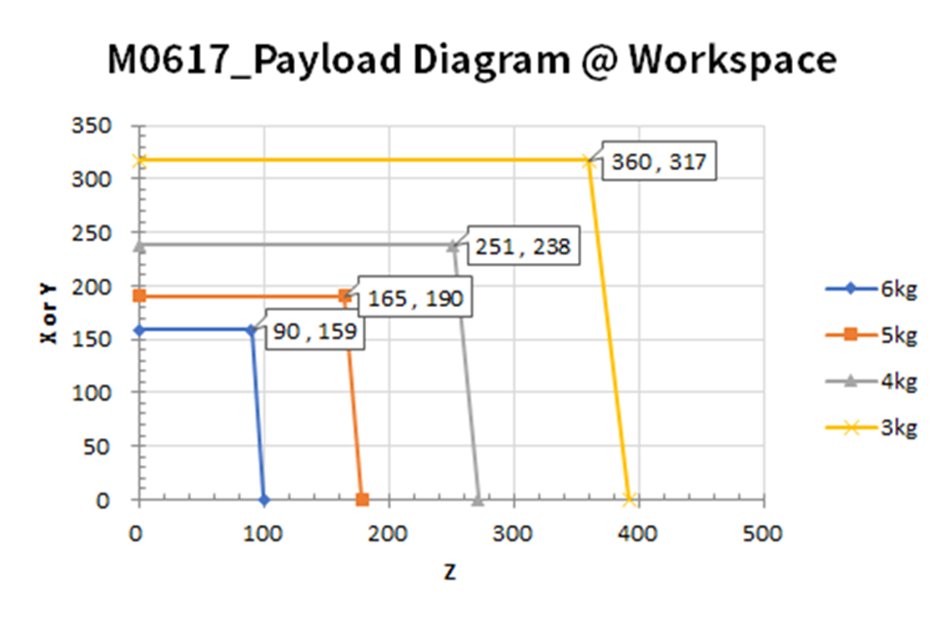
M0617
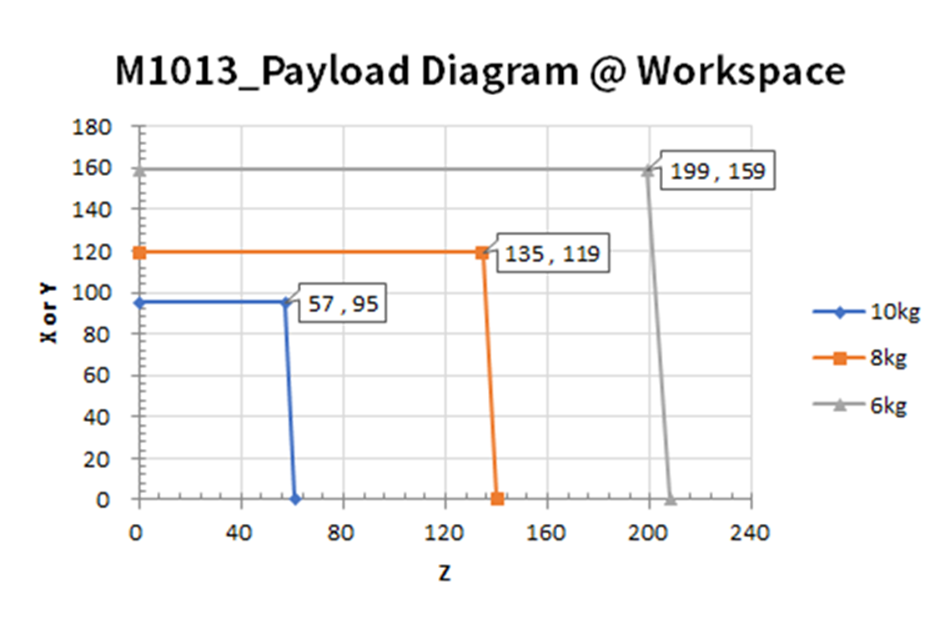
M1013
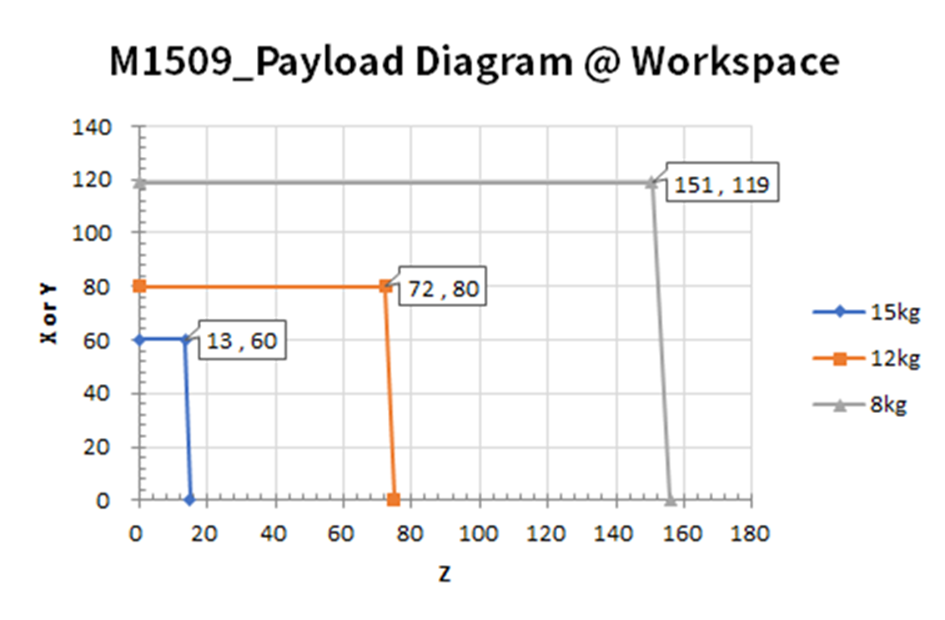
M1509
H2017
H2515
Megengedett nyomaték és tehetetlenség
A J4-J6 robot esetén a megengedett nyomaték és tehetetlenség a következő:
|
Modell neve |
J4 |
J5 |
J6 |
|||
|---|---|---|---|---|---|---|
|
Megengedett nyomaték |
Tehetetlenség |
Megengedett nyomaték |
Tehetetlenség |
Megengedett nyomaték |
Tehetetlenség |
|
|
M0609 |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
|
M0617 |
||||||
|
M1013 |
||||||
|
M1509 |
||||||
|
H2017 |
145 Nm
|
8.0 kg㎡
|
81Nm |
4.5 kg㎡
|
36 Nm
|
2.0 kg㎡ |
|
H2515 |
||||||