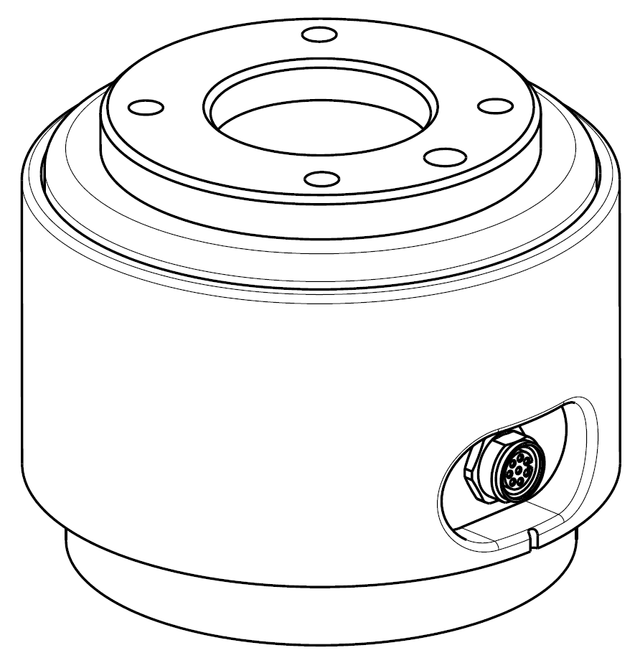
A robot végkarima burkolatán egy M8-as specifikációjú 8 tűs csatlakozó található, amelynek helyét és alakját az alábbi ábra mutatja.
A 2022 augusztusa után gyártott termékek alakja és csatlakozóinak tájolása megváltozott, ahogy az az alábbi ábrán látható.
ㅤ
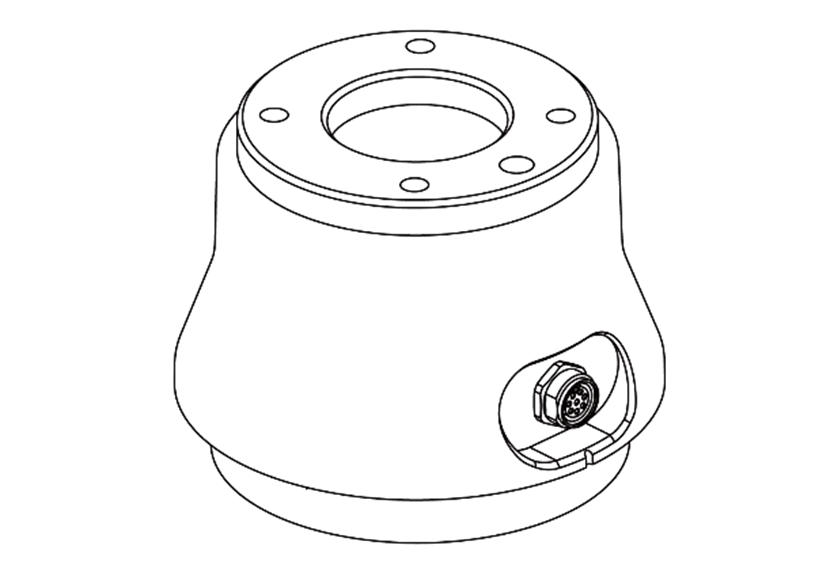
A 2022 augusztusa előtt gyártott termékek az alábbiakban láthatók.
A csatlakozó az adott robotszerszámokba ágyazott megfogók és érzékelők működtetéséhez szükséges áramot és vezérlőjeleket biztosítja. Az alábbiak példák ipari kábelekre (használhatók ezzel egyenértékű kábelek):
-
Phoenix contact 1404178 (egyenes)
-
Phoenix contact 1404182 (derékszögű)
Kapcsolási rajz
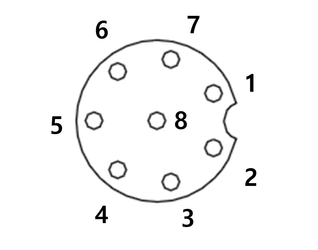
Az egyes csatlakozók tüskéinek térképe a következő:
A 2022 augusztusa után gyártott termékeknél a csatlakozó tájolása az alábbi ábrán látható módon megváltozott.
ㅤ
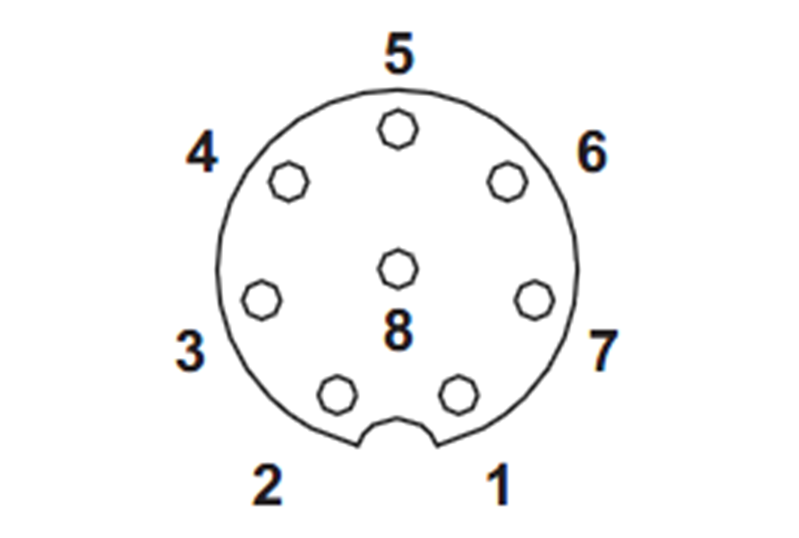
A 2022 augusztusa előtt gyártott termékek az alábbiakban láthatók.
Az X1 csatlakozó által biztosított részletes I/O konfigurációért lásd az alábbi táblázatot.
2024.11.04-től a következőképpen változott.
X1 beállítás
|
No |
Signal type |
Description |
|---|---|---|
|
1 |
Digital Input 1 |
PNP (forrástípus, alapértelmezett) |
|
2 |
Digital Output 1 |
állítsa be PNP-re (forrástípus, alapértelmezett) vagy NPN-re (nyelő típusa) |
|
3 |
Digital Output 2 |
állítsa be PNP-re (forrástípus, alapértelmezett) vagy NPN-re (nyelő típusa) |
|
4 |
Analog Input 1 / RS-485 + |
állítsa be Feszültség (0-10V) vagy Áram (4-20mA, alapértelmezett) / Max 1M adatátviteli sebesség |
|
5 |
Power |
Állítsa a belső tápegységet +24 V-ra (alapértelmezett), +12 V-ra vagy 0 V-ra |
|
6 |
Analog Input 2 / RS-485 - |
állítsa be Feszültség (0-10V) vagy Áram (4-20mA, alapértelmezett) / Max 1M adatátviteli sebesség |
|
7 |
Digital Input 2 |
PNP (forrástípus, alapértelmezett) |
|
8 |
GND |
|
A karima bemeneti/kimeneti (I/O) kezdeti teljesítménye 0V-ra van állítva, és 12V-ra vagy 24V-ra is beállítható.
Az I/O csatlakozás során fellépő részletes tápellátási adatokért lásd az alábbi táblázatot.
|
Parameter |
Min |
Type |
Max |
Unit |
|---|---|---|---|---|
|
Supply voltage (12V mode) |
11.4 |
12 |
12.6 |
V |
|
Supply voltage (24V mode) |
22.8 |
24 |
25.2 |
V |
|
Supply current |
- |
- |
3 |
A |
ㅤ
A 2024.11.04. előtti I/O konfigurációk a következők. (2020.01.21-től)
X1 beállítás (digitális I/O, RS 485)
A beállítás az alábbi módon volt feltöltve 2021. január 21. óta.
|
No |
Signal type |
Description |
Megjegyzés |
|
1 |
Digital Input 1 |
PNP (forrástípus, alapértelmezett) |
Mfg dátum
Mfg dátum
Egyéb érvényes sorozatszámok
|
|
2 |
Digital Output 1 |
állítsa be PNP-re (forrástípus, alapértelmezett) vagy NPN-re (nyelő típusa) |
|
|
3 |
Digital Output 2 |
állítsa be PNP-re (forrástípus, alapértelmezett) vagy NPN-re (nyelő típusa) |
|
|
4 |
RS485 A |
Max 1M adatátviteli sebesség |
|
|
5 |
Power |
+24V |
|
|
6 |
RS485 B |
Max 1M adatátviteli sebesség |
|
|
7 |
Digital Input 2 |
PNP (forrástípus, alapértelmezett) |
|
|
8 |
GND |
|
Vigyázat
-
A szerszámokat és megfogókat csak azután konfigurálja hogy ellenőrizte az I/O konfigurációt a gyártási dátum (robot címke mfg dátuma) alapján.
-
Megtalálható a Doosan Robotlab webhelyén. (https://robotlab.doosanrobotics.com)
-
Ha az I/O konfiguráció figyelmen kívül hagyásával működtet robot szerszámokat, a termék tönkremehet.
A karima I/O belső árama 24 V értékre van beállítva, és az I/O csatlakoztatás alatti részletes áramspecifikációkat lásd az alábbi táblázatban.
|
Paraméter |
Min. |
Típus |
Max. |
Mértékegység |
|
Supply voltage |
- |
24 |
- |
V |
|
Supply current |
- |
2 |
3 |
A |
|
Digital output |
- |
2 |
- |
EA |
|
Digital input |
- |
2 |
- |
EA |
ㅤ
A 2020.01.21. előtti I/O konfigurációk a következők.
X1 beállítás (digitális I/O, RS 485)
|
No |
Signal type |
Description |
Megjegyzés |
|
1 |
RS485 A |
Max 1M adatátviteli sebesség |
Mfg dátum
|
|
2 |
RS485 B |
Max 1M adatátviteli sebesség |
|
|
3 |
Digital Output 1 |
állítsa be PNP-re (forrástípus, alapértelmezett) vagy NPN-re (nyelő típusa) |
|
|
4 |
Digital Output 2 |
állítsa be PNP-re (forrástípus, alapértelmezett) vagy NPN-re (nyelő típusa) |
|
|
5 |
Power |
+24V |
|
|
6 |
Digital Input 2 |
PNP (forrástípus, alapértelmezett) |
|
|
7 |
Digital Input 1 |
PNP (forrástípus, alapértelmezett) |
|
|
8 |
GND |
|
Figyelem
-
Úgy állítsa be a szerszámot és a megfogót, hogy az áram megszűnésekor ne idézzenek elő veszélyt.
(pl. a szerszámról leeső munkadarab)
-
Amikor a robot kap áramot, minden csatlakozó 5. kapcsán mindig 24 V van, ezért amikor a szerszámot és a megfogót beállítja, feltétlenül szakítsa meg a robot áramellátását.