必須 簡単 1 分
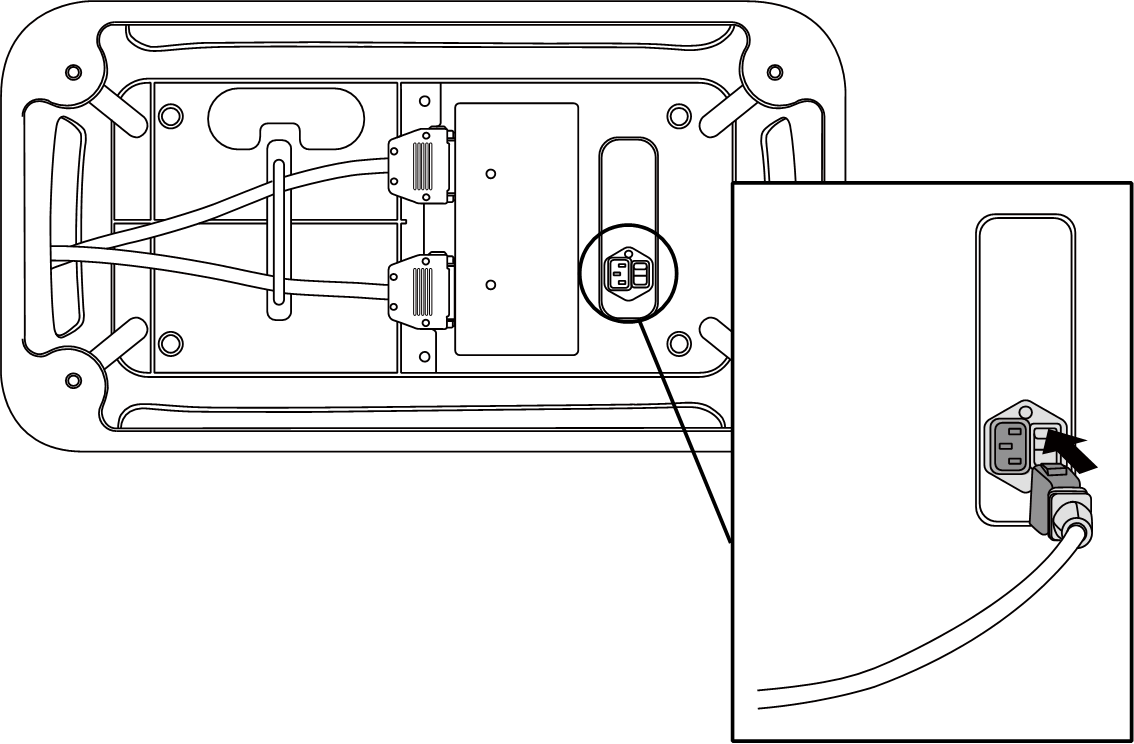
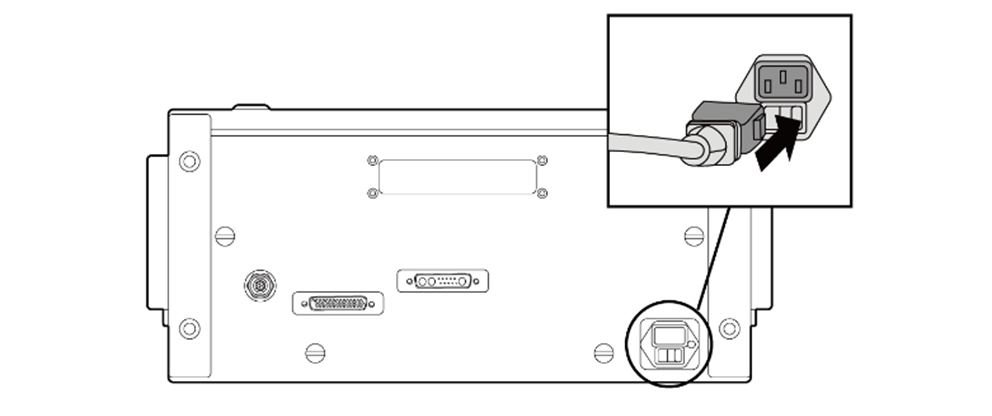
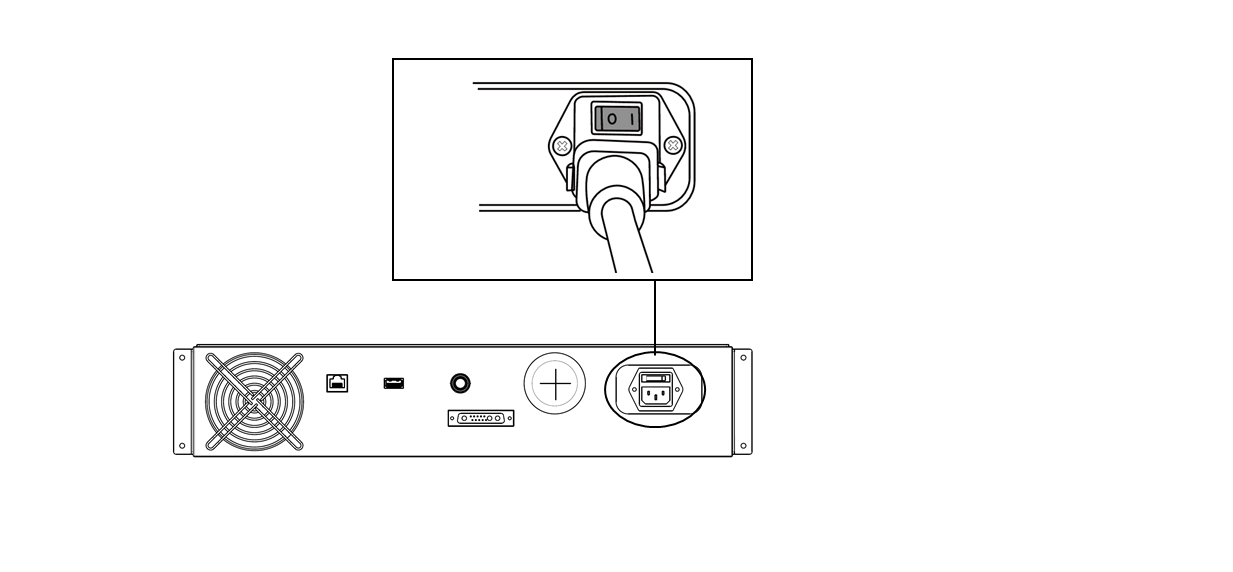
コントローラに電力を供給するには、コントロールボックスの電源ケーブルを標準の IEC 電源コンセントに接続します。
-
電源ケーブルを接続したら、ロボットが適切に接地されていることを確認します(電気接地接続)。
-
コントローラ内部のアース記号に関連する未使用のボルトを使用して、システム内のすべての装置に共通のアースを確立します。アース導体は、システムの最大電流定格を満たしている必要があります。
-
詳細については、を参照 コントローラーに電源をつなぐしてください。
Scroll conditional content
 電源装置は、アースやブレーカーなどの最小要件を満たしている必要があります。付属の AC コントローラの電気仕様は次のとおりです。
電源装置は、アースやブレーカーなどの最小要件を満たしている必要があります。付属の AC コントローラの電気仕様は次のとおりです。
1m/hseries
Scroll conditional content
 電源装置は、アースやブレーカーなどの最小要件を満たしている必要があります。付属の AC コントローラの電気仕様は次のとおりです。
電源装置は、アースやブレーカーなどの最小要件を満たしている必要があります。付属の AC コントローラの電気仕様は次のとおりです。
2aseries
Scroll conditional content
 電源装置は、アースやブレーカーなどの最小要件を満たしている必要があります。付属の AC コントローラの電気仕様は次のとおりです。
電源装置は、アースやブレーカーなどの最小要件を満たしている必要があります。付属の AC コントローラの電気仕様は次のとおりです。
3eseries
Scroll conditional content
電源装置は、アースやブレーカーなどの最小要件を満たしている必要があります。付属の AC コントローラの電気仕様は次のとおりです。
hidecontents
Scroll conditional content
電源装置は、アースやブレーカーなどの最小要件を満たしている必要があります。付属の AC コントローラの電気仕様は次のとおりです。
tet
|
パラメータ |
仕様 |
|---|---|
|
入力電圧 |
100 ~ 240 VAC |
|
入力電源ヒューズ( 100 ~ 240 V 時) |
15 A |
|
入力周波数 |
47 ~ 63 Hz |
オプションのコントローラ情報については、次の付録を参照してください。