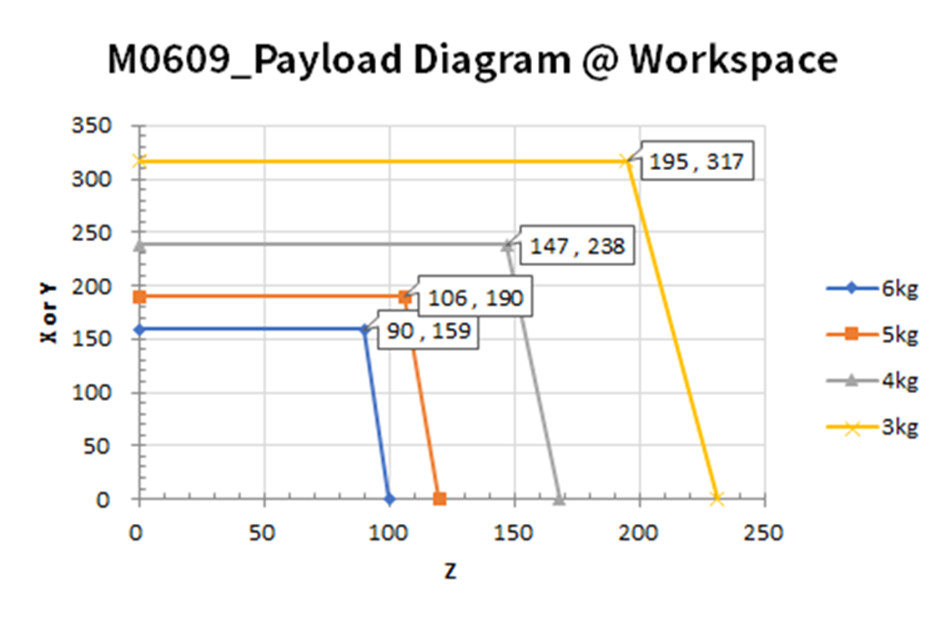
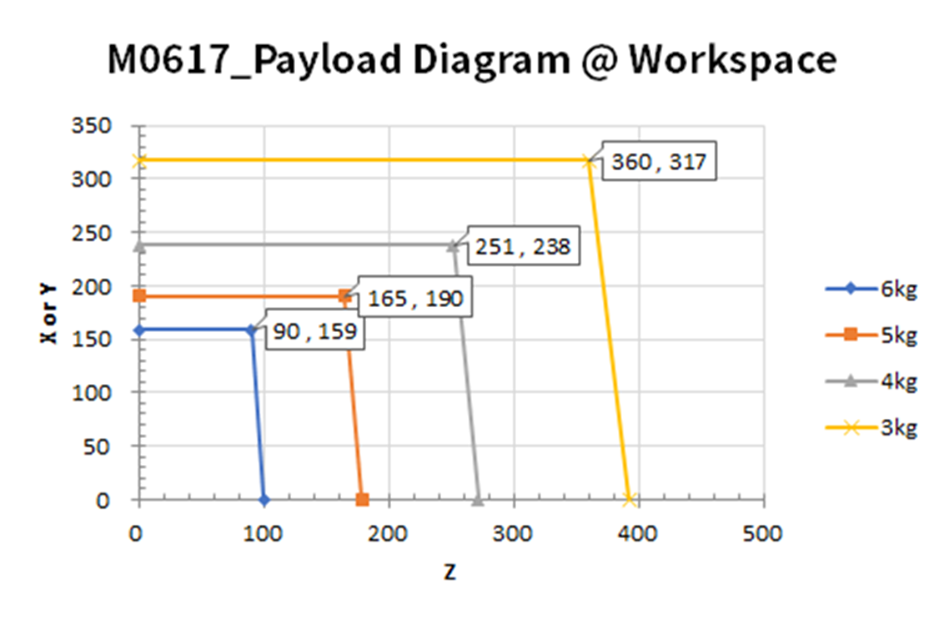
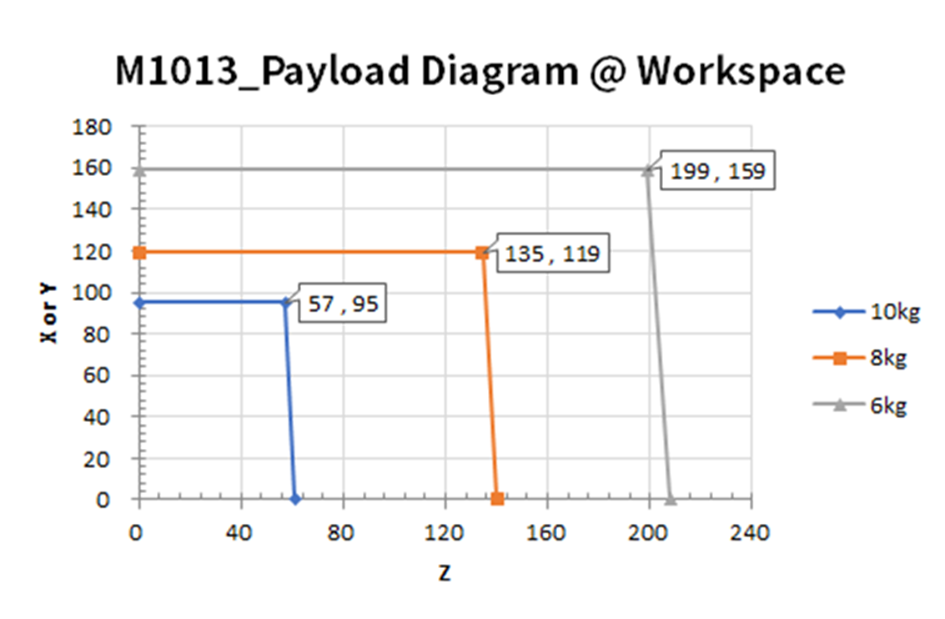
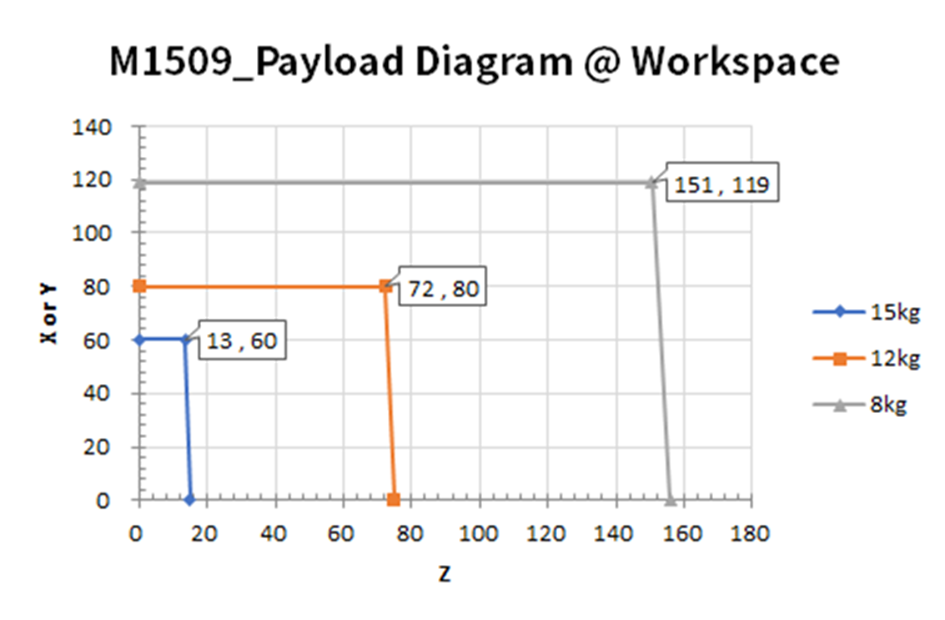
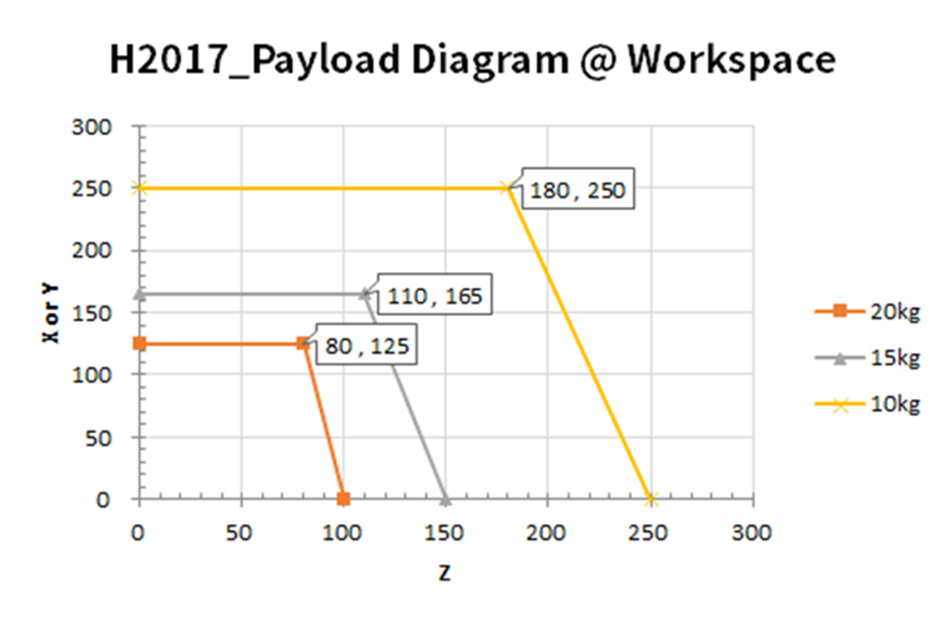
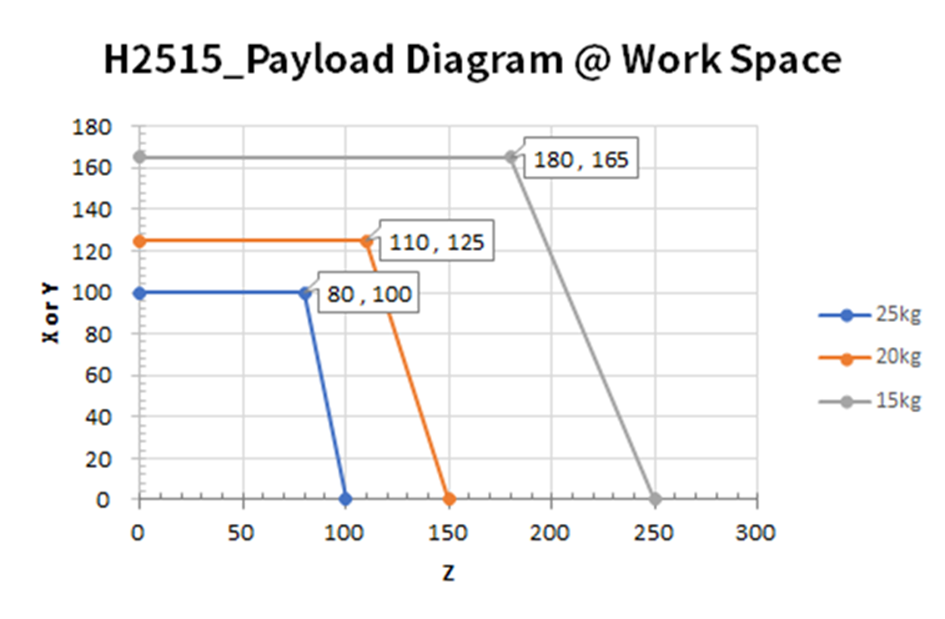
作業領域内でのロボットの最大ペイロードは重心の距離によって異なります。距離別のペイロードは次のとおりです。
本負荷ダイアグラムは、小さなツールの負荷体積を仮定しています。同じ重量のツールでも大きな負荷体積を持つ場合、ツールの重心は上のペイロードよりも制限されることがあり、その場合振動などが発生する可能性があります。
M0609
M0617
M1013
M1509
H2017
H2515
許容モーメント及び慣性(Inertia)
ロボットのJ4~J6の許容モーメント及び慣性(Inertia)情報は下記のとおりです。
|
モデル名
|
J4 |
J5 |
J6 |
|||
|---|---|---|---|---|---|---|
|
許容モーメント |
慣性(Inertia) |
許容モーメント |
慣性(Inertia) |
許容モーメント |
慣性(Inertia) |
|
|
M0609 |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
|
M0617 |
||||||
|
M1013 |
||||||
|
M1509 |
||||||
|
H2017 |
145 Nm
|
8.0 kg㎡
|
81Nm |
4.5 kg㎡
|
36 Nm
|
2.0 kg㎡ |
|
H2515 |
||||||