스킬을 작성하기 전 사용자는 사전에 화면 구성과 로봇의 동작 순서를 기획해야 합니다.
-
사용자 입력 화면 기획 및 UI Component 선정
-
동작 순서도 기획
사용자 입력 화면 기획 및 UI Component 선정
'Sample_Pick' 스킬의 사용자 입력 화면 기획 및 UI Component의 선정 예시입니다.
|
분류 |
이름 |
기능 |
UI Component |
|---|---|---|---|
|
Basic Setting |
Reference Pose |
교시점 |
|
|
Gripper Setting |
Gripper Release (Option) |
Gripper 동작 옵션 |
|
|
Gripper Wait Time |
Gripper 동작 후 대기 시간 |
|
|
|
Set TCP (Option) |
TCP 선택 옵션 |
|
|
|
Approach/Retract Pose Setting (Option) |
Approach/Retract Distance |
교시점과의 거리 입력 |
|
|
Velocity for Approach/Retract Pose |
교시점과 떨어진 위치까지 가는 속도 입력 |
|
|
|
Acceleration for Approach/Retract Pose |
교시점과 떨어진 위치까지 가는 가속도 입력 |
|






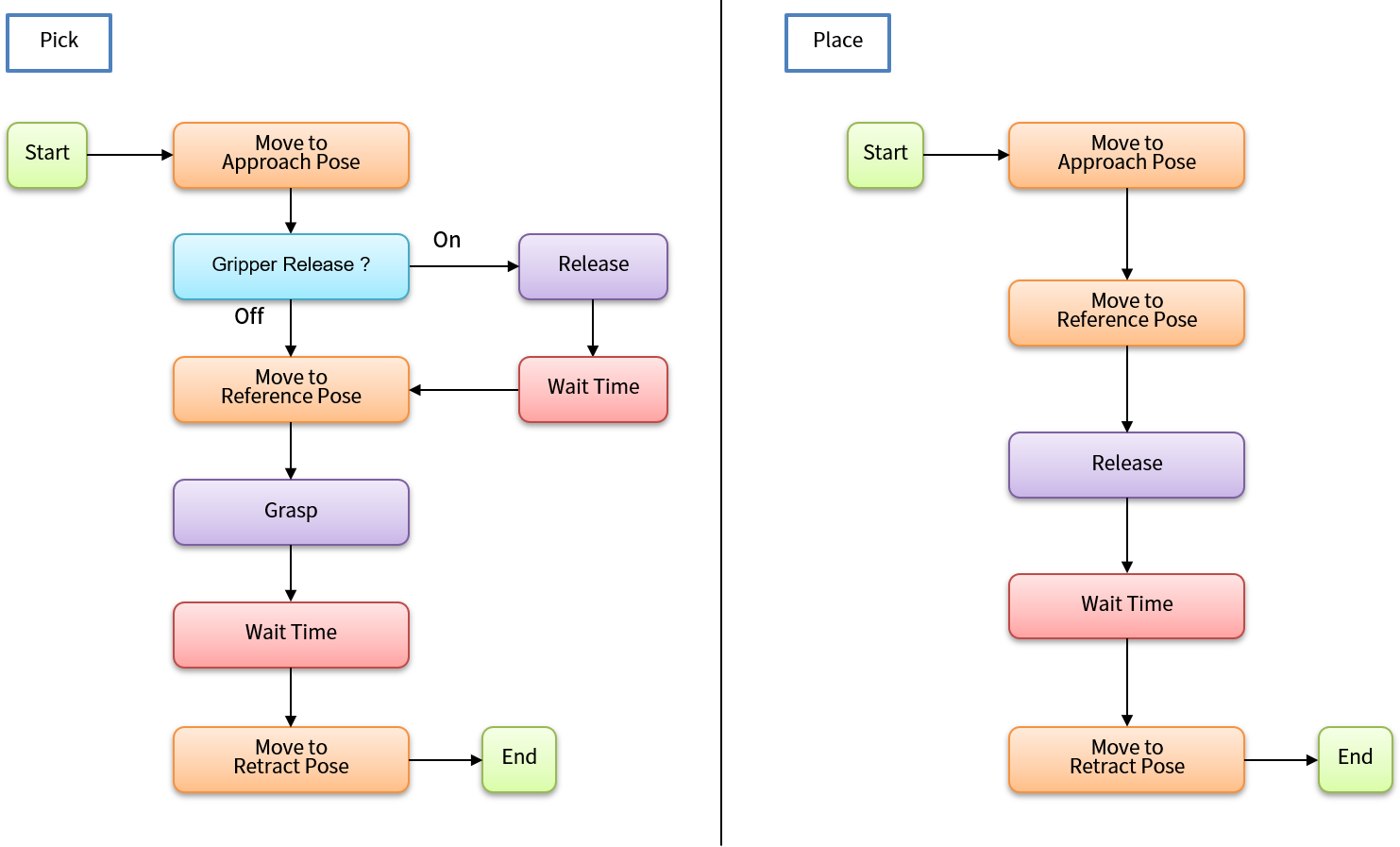
동작 순서도 기획
'Sample_Pick' 과 'Sample_Place' 스킬의 동작에 대한 순서도(Flow Chart)의 작성 예시입니다.