Voer de onderstaande stappen uit om de robot naar een bepaalde hoek te verplaatsen:
-
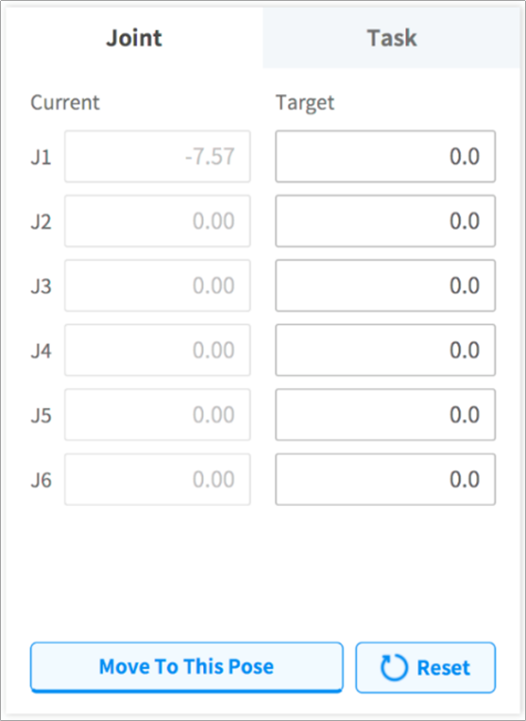
Selecteer het tabblad Bewegen en vervolgens het tabblad Gewricht.
-
Voer de doelhoek van het robotgewricht in.
-
Schakel de Real-modus

-
Houd de knop Bewegen naar corresponderende pose ingedrukt om de hoek van het robotgewricht aan te passen.