Dit is een handige functie als het werkstuk voor werkstukinstructie in een asrichting is uitgelijnd met het TCP. Als u instructie wilt uitvoeren nadat de pose is vergrendeld, gebruikt u de directe leerfunctie van het vlak of de lijn met cockpitknoppen.
Voer de onderstaande stappen uit om het TCP van de robot uit te lijnen op basis van het doel:
-
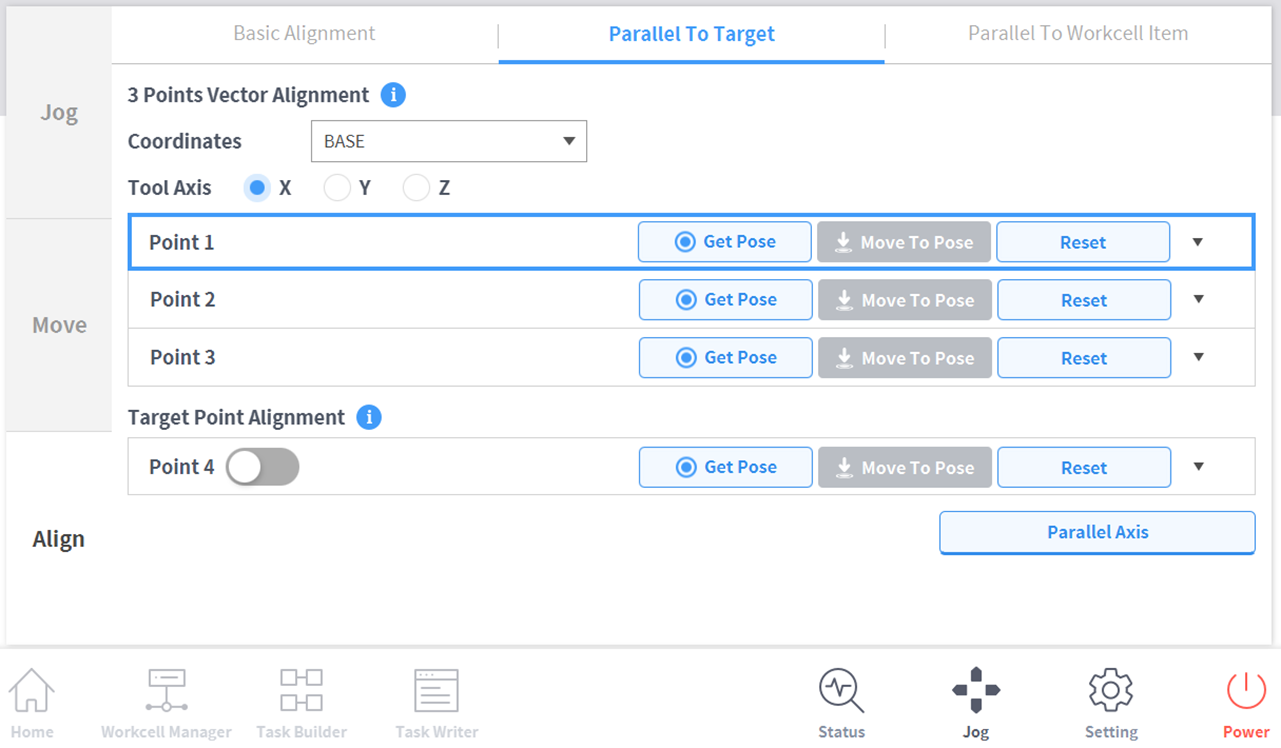
Selecteer het tabblad Uitlijnenen vervolgens het tabblad Parallel aan doel.
-
Selecteer de referentiecoördinaten voor uitlijning.

-
Selecteer de toolas die u wilt uitlijnen.

-
Verplaats de robot naar de gewenste positie en tik op Punt 1.
-
Tik op de knop Pose opslaan van Punt 1.Punt 2 en Punt 3 worden op dezelfde manier ingesteld. Wanneer de instelling is voltooid, hebt u een virtueel vectorgebied ingesteld op basis van de drie punten.
-
(Optioneel) Als u de TCP-richting en positie samen wilt instellen, drukt u op de wisselknop van Punt 4, beweegt u de robot naar de gewenste positie en tikt u op de knop Pose opslaan.
-
Tik en houd de knop As uitlijnen ingedrukt om de as uit te lijnen.Plaats de 6-assige kop 150 mm boven het doel in de richting van de Z-as.