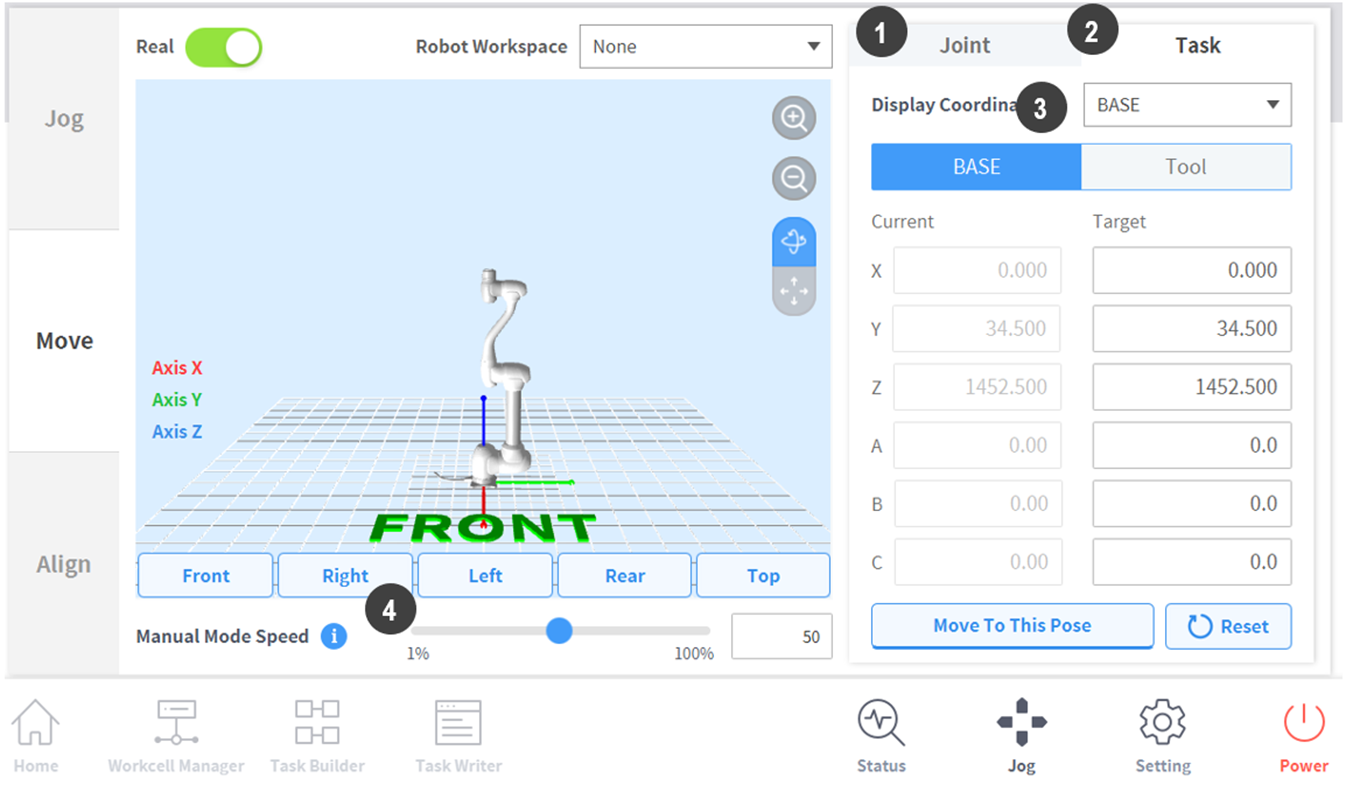
Robot se může pohybovat podle úhlu/souřadnic cíle na obrazovce Pohyb. Pokud souřadnice, do kterých se má robot pohybovat, jsou známé nebo pokud se robot musí pohybovat v souřadnici v desetinných zlomcích, lze robota posunout zadáním souřadnic.
|
Č. |
Položka |
Popis |
|---|---|---|
|
1 |
Joint |
Konfiguruje referenční souřadnice, které se mají použít při pohybu robota pomocí pojíždění. |
|
2 |
Task |
Konfiguruje referenční úhel, který se má použít při pohybu robota pomocí pojíždění. |
|
3 |
Reference Point Setting |
Konfiguruje referenční bod pro zarovnání dle souřadnic úlohy. Základnové: Konfiguruje souřadnice úlohy podle základny robota. Světové: Nastavuje souřadnice úlohy podle nastavených Světových souřadnic. Nástrojové: Konfiguruje souřadnice úlohy podle nástroje nainstalovaného na konci šesté osy robota. |
|
4 |
Manual Mode Speed |
Konfiguruje rychlost pohybu robota v manuálním režimu. Rychlost lze upravit posunutím posuvného ukazatele. Pokud je posuvný ukazatel na 100 %, odpovídající maximální rychlost kloubu na kartě Pohyb je 30 st/s, a maximální rychlost úlohy je 250 mm/s. Rychlost ovlivňuje provozní rychlost pojíždění i tlačítka. |