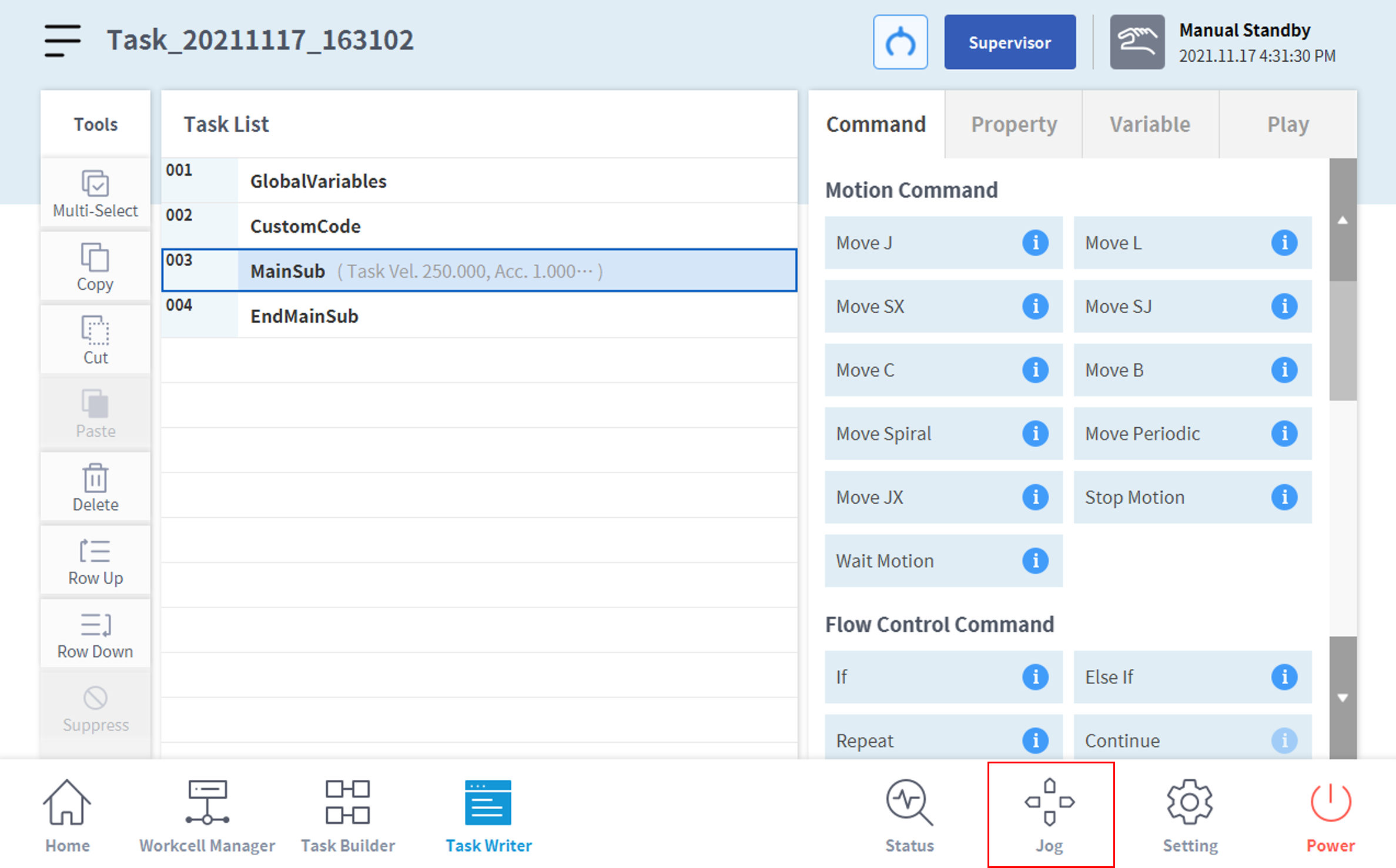
Použití příkazu Pojíždění + (Jog+) umožňuje používat funkci pojíždění současně při provádění různých činností. Toho lze využít, když je během výcviku robota vyžadován přesný pohyb do cílového bodu.
Pojíždění + (Jog+) lze aktivovat následujícími způsoby.
-
Stiskněte tlačítko Pojíždění na více než 1 sekundu v hlavní nabídce ve spodní části obrazovky.
-
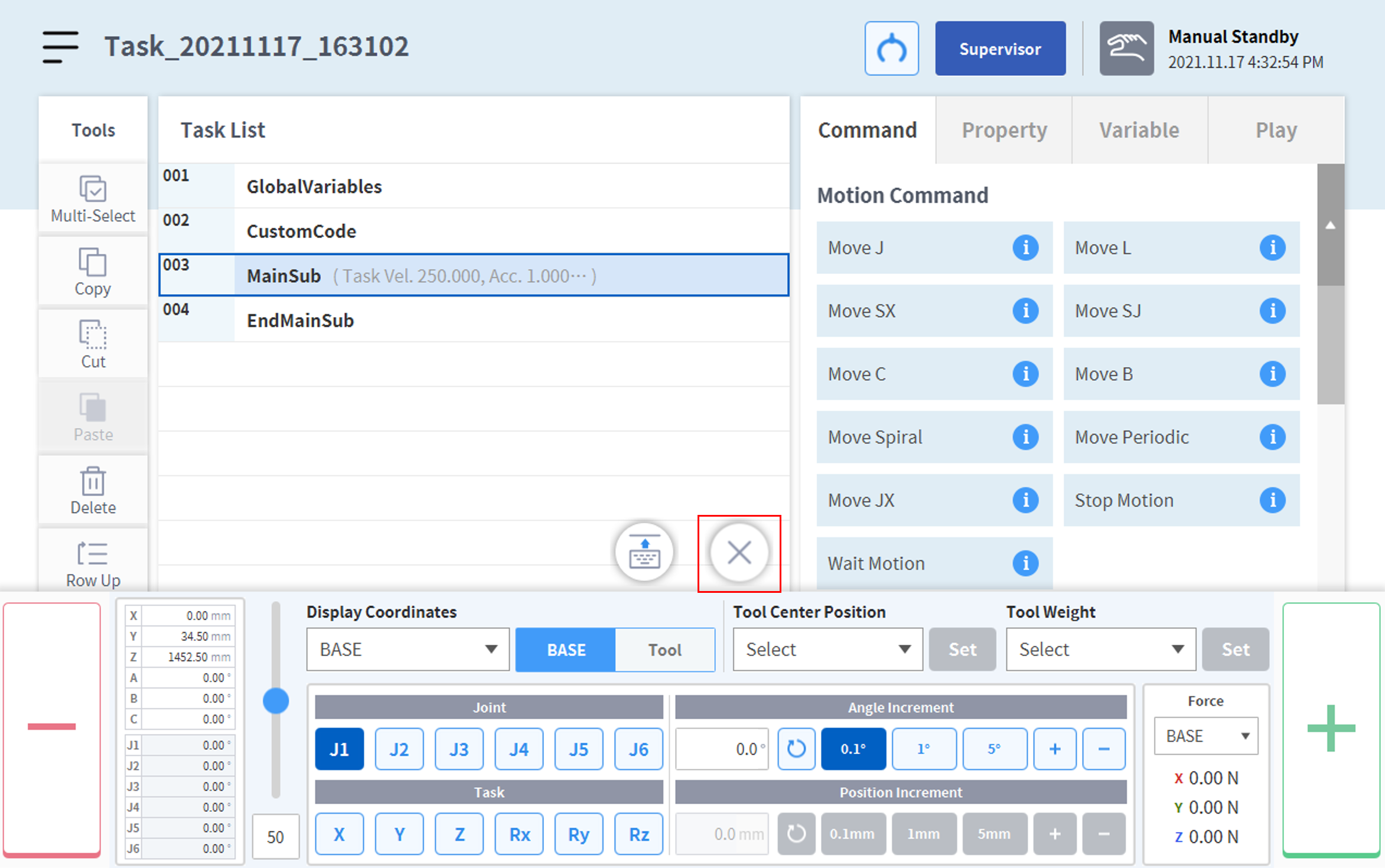
Je aktivována obrazovka Pojíždění+.
-
Pojíždění+ lze deaktivovat stisknutím tlačítka „X“.
|
Č. |
Položka |
Popis |
|---|---|---|
|
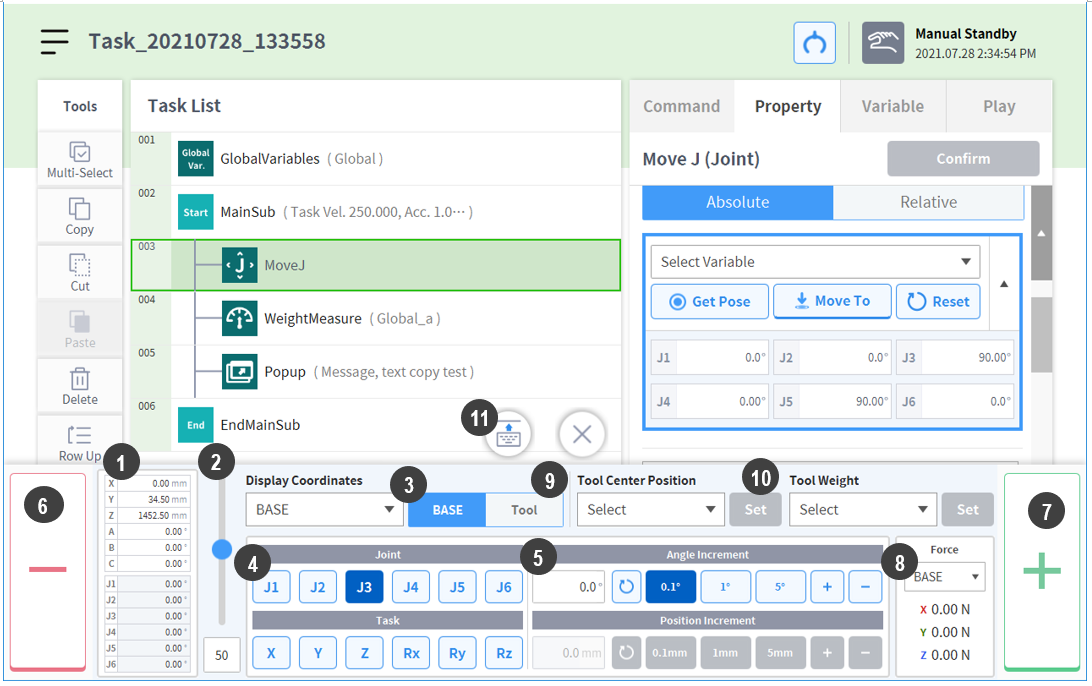
1 |
Current robot pose |
Zobrazuje pozici robota na základě nastavených zobrazovacích souřadnic. |
|
2 |
Manual Mode Speed |
Nakonfiguruje rychlost pohybu robota v manuálním režimu. Rychlost lze upravit posunutím posuvného ukazatele. Pokud je posuvný ukazatel na 100 %, odpovídající maximální rychlost kloubu na kartě Pojíždění je 30 st/s a maximální rychlost úlohy je 250 mm/s. Tato rychlost ovlivňuje rychlost řízenou tlačítky pojíždění a pohybu. |
|
3 |
Reference Point Setting |
Konfiguruje referenční bod pro zarovnání dle souřadnic úlohy. Základnové: Konfiguruje souřadnice úlohy podle základny robota. Světové: Nastavuje souřadnice úlohy podle nastavených světových souřadnic. Nástrojové: Konfiguruje souřadnice úlohy podle nástroje nainstalovaného na konci šesté osy robota. |
|
4 |
Select Axis |
Vybere osu, se kterou se má pohybovat. Karta Kloub: Vyberte jednu osu z J1–J6. Karta Úloha: Vyberte jednu osu z X–Rz. |
|
5 |
Select Increment |
Zadá číslo, o kolik se má vybraná osa posunout. |
|
6 |
Move – Button |
Pokud tlačítko podržíte stisknuté, vybraná osa se posune ve směru – podle umístění přírůstku. |
|
7 |
Move – Button |
Pokud tlačítko podržíte stisknuté, vybraná osa se posune ve směru + podle umístění přírůstku. |
|
8 |
Force Monitoring |
Zobrazí vyskytující se vnější sílu na základě vybraného souřadnicového systému. |
|
9 |
TCP Setting: |
Nastaví TTCP. |
|
10 |
Tool Weight Indicator |
Nastaví hmotnost nástroje. |
|
11 |
Change Jog+ location |
Změní umístění funkce Pojíždění+ (Jog+) na horní nebo dolní část obrazovky. |