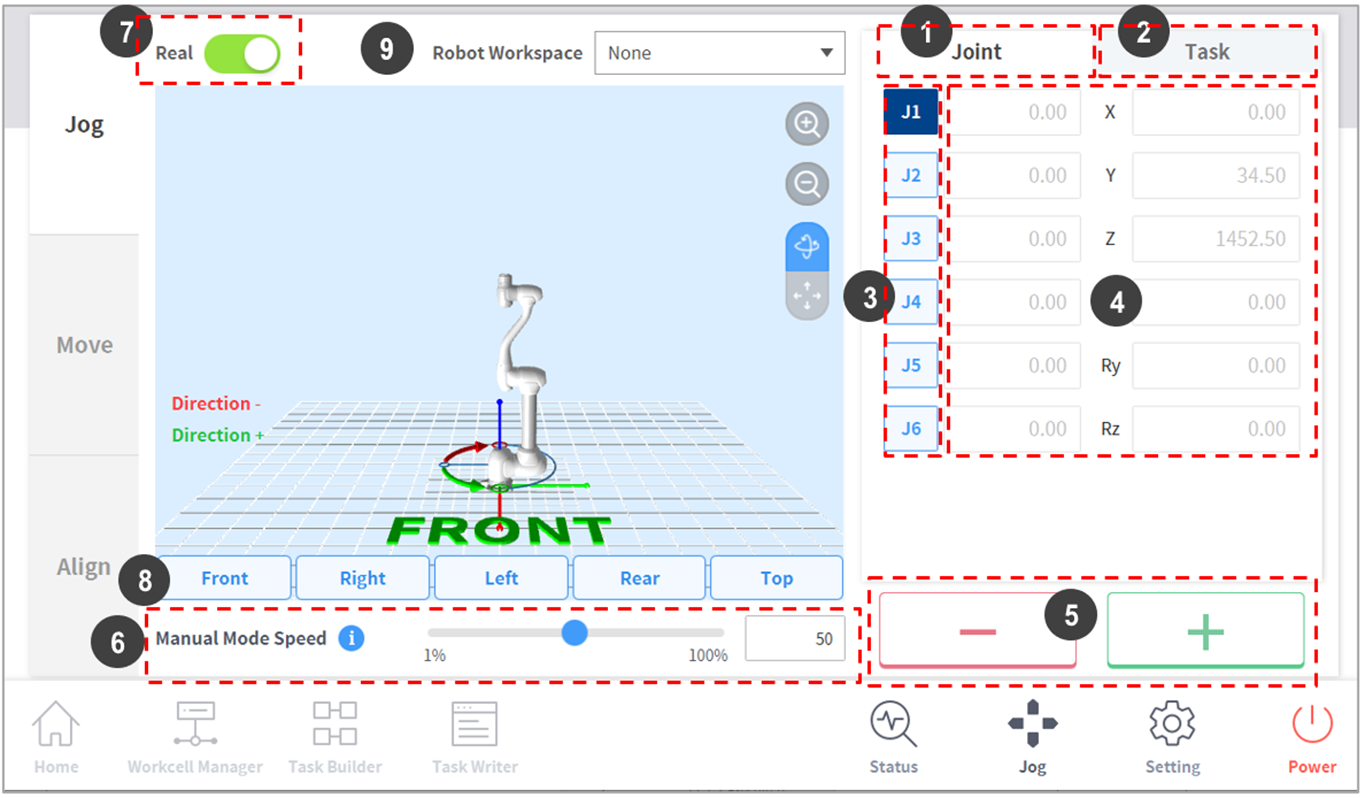
Robota lze navigovat na základě aktuální pozice na obrazovce pojíždění.
|
Č. |
Položka |
Popis |
|---|---|---|
|
1 |
Joint |
Konfiguruje kloub jako referenční souřadnici pro režim pojíždění. |
|
2 |
Task |
Konfiguruje úlohu jako referenční souřadnici pro režim pojíždění. |
|
3 |
Select Axis |
Vybírá osu, podle které se bude pohybovat v režimu pojíždění.
|
|
4 |
Coordinate Display |
Zobrazí se souřadnice robota, které jsou v režimu Pojíždění momentálně aktivní. Pokud se poloha robota změní kvůli stisknutí tlačítka směru, změní se také souřadnice. |
|
5 |
Direction |
Posune robota ve směru + nebo - ve vybrané ose. |
|
6 |
Manual Mode Speed |
Nakonfiguruje rychlost pohybu robota v manuálním režimu. Rychlost lze upravit posunutím posuvného ukazatele. Pokud je posuvný ukazatel na 100 %, odpovídající maximální rychlost kloubu na kartě Pojíždění je 30 st/s, a maximální rychlost úlohy je 250 mm/s. Tato rychlost ovlivňuje rychlost řízenou tlačítky pojíždění a pohybu. |
|
7 |
Real Mode |
Nastavuje, zda bude robot pracovat v reálném režimu, když bude v režimu pojíždění.
|
|
8 |
Simulator Alignment |
Nastavuje směr natočení robota zobrazený na simulátoru. Stisknutím tlačítka pro každý směr natočí robota do odpovídajícího směru. |
|
9 |
Robot Workspace |
Zobrazuje informace o pracovním prostoru robota registrované ve Workcell Manager v Simulátoru pojíždění. Stisknutím rozevírací nabídky se vybere pracovní prostor k zobrazení. |


-
Limit rychlosti TCP: Nejvyšší provozní rychlost během použití tlačítek pojíždění a pohybu je podle bezpečnostních zásad omezena na 250 mm/s.
-
Pokud se robot zastaví, protože dosáhl limitu kloubu, nebo pokud byla v režimu pojíždění robota detekována kolize, nastavte režim bezpečnostního obnovení a posuňte robota tak, aby byl v rozmezí povolených úhlů kloubu. Více informací o metodách režimu Bezpečnostního obnovení najdete v části „ (2.12-cs_CZ) Režim bezpečnostního obnovení“.