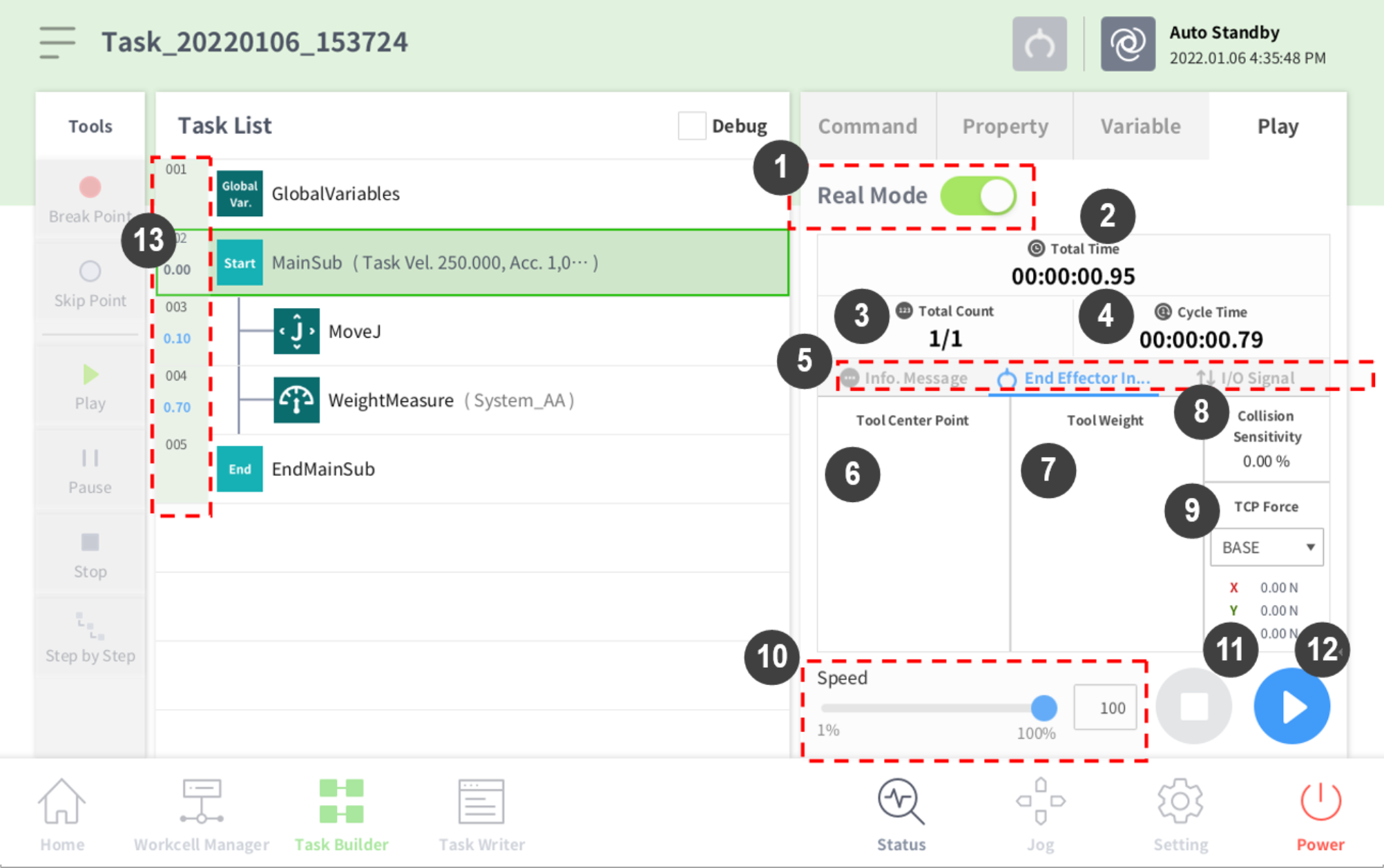
Karta informací o koncovém efektoru na obrazovce reálného režimu v aplikaci Task Builder je strukturovaná následovně:
|
Č. |
Položka |
Popis |
|
1 |
Real Mode ( |
Nastaví robota do režimu přehrání testu.
|
|
2 |
Total time |
Zobrazí celkový čas, který uplynul od provedení úlohy. |
|
3 |
Total count |
Zobrazí celkový počet provedení dané úlohy. |
|
4 |
Average execution time |
Zobrazí průměrný čas strávený vykonáváním jednoho cyklu úlohy v seznamu úloh. |
|
5 |
Information Screen Shift Tab |
Můžete přepínat mezi obrazovkou s Informativní zpráva o robotu, informační obrazovkou koncového efektoru a obrazovkou s informacemi o vstupu/výstupu.
|
|
6 |
Tool center point information area |
Zobrazuje střed nástroje nakonfigurovaný prostřednictvím konfiguračních funkcí středového bodu nástroje a hmotnosti příkazu TCP nebo pojíždění. |
|
7 |
Tool weight information |
Zobrazuje hmotnost nástroje nakonfigurovanou prostřednictvím konfiguračních funkcí středu nástroje a hmotnosti příkazu TCP nebo pojíždění. |
|
8 |
Collision information area |
Zobrazuje hodnotu citlivosti kolize nastavenou pro oblast, kde se robot aktuálně nachází. |
|
9 |
Force information area |
Zobrazuje informace o síle vyskytující se v základním, světovém, uživatelském a referenčním systému souřadnic. Referenční systém souřadnic zobrazuje sílu na základě informací o systému souřadnic, který je použit u robota. |
|
10 |
Speed slider |
Nastaví rychlost robota v reálném nebo virtuálním režimu. |
|
11 |
Stop button |
Zastaví aktuální úlohu. |
|
12 |
Execute/pause toggle button |
Provede nebo pozastaví pracovní úkol v seznamu úloh. |
|
13 |
Time |
Zobrazí čas strávený korespondencí příkazu/dovednosti. |

-
Před skutečným provedením úlohy ji proveďte ve virtuálním režimu, abyste zkontrolovali, zda úloha pracuje tak, jak má.
-
Doporučuje se otestovat program robota určením dočasných trasových bodů mimo pracovní prostor jiného stroje. Společnost Doosan Robotics není odpovědná za škody, k nimž dojde kvůli programovacím chybám nebo nesprávné funkci robota, ani za škody na vybavení.
-
Tlačítko nouzového zastavení je umístěno na učícím ovladači. V případě nouzové situace stiskněte tlačítko nouzového zastavení, čímž robota zastavíte.