Povinné Normální 15 min
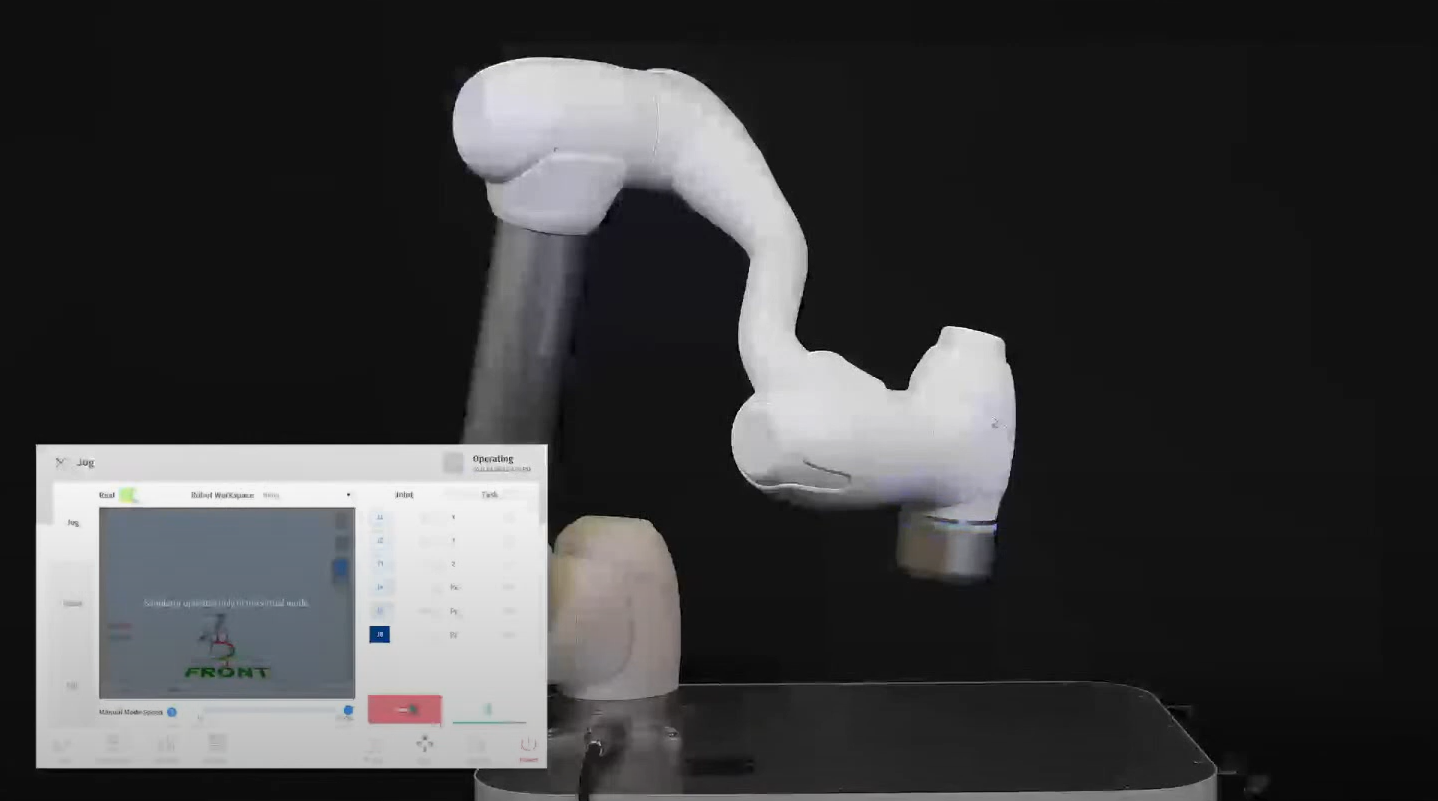
Uživatel může vybrat metodu ručního pohybu na kartě Jog. Další informace o krokování/posunu/zarovnání naleznete v (2.11.0.1_temp-cs_CZ) Funkce Pojížděníčásti .
-
Vybočení: Posune kloub robota nebo TCP na osu spoje nebo osu souřadnic, kterou uživatel vybral
-
Přesunout: Přesune kloub robota nebo TCP do cílového bodu, do kterého uživatel zadal
-
Zarovnat: Posune konec robota k rovině kolmé k uživatelem zvolené rovině a souřadnicové ose rovnoběžné s koncem robota
Pohyb robota se skládá ze dvou typů.
-
Pohyb spoje: Pohybuje každý kloub lineárně rotujícím pohybem
-
Pohyb úkolu: Posouvá konec lineárně k cílovému bodu
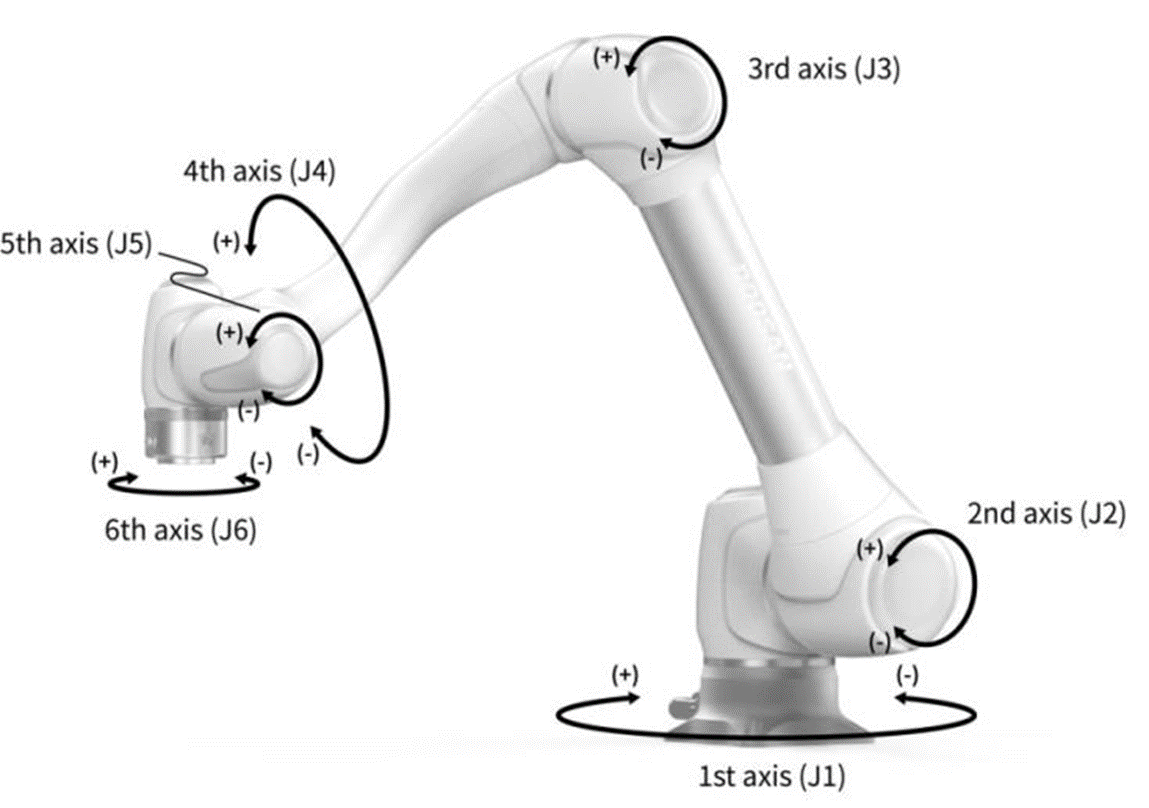
Následující postup je způsob, jak pohybovat robotem pomocí pohybu kloubu z obrazovky JOG:
-
Vyberte záložku spoj.
-
Vyberte osu, kterou chcete přesunout. Můžete například vybrat J1.
-
Stisknutím tlačítka +/- robot přesunete. Robot se pohybuje při stisknutí tlačítka +/- a aktuální poloha se zobrazuje na obrazovce v reálném čase.
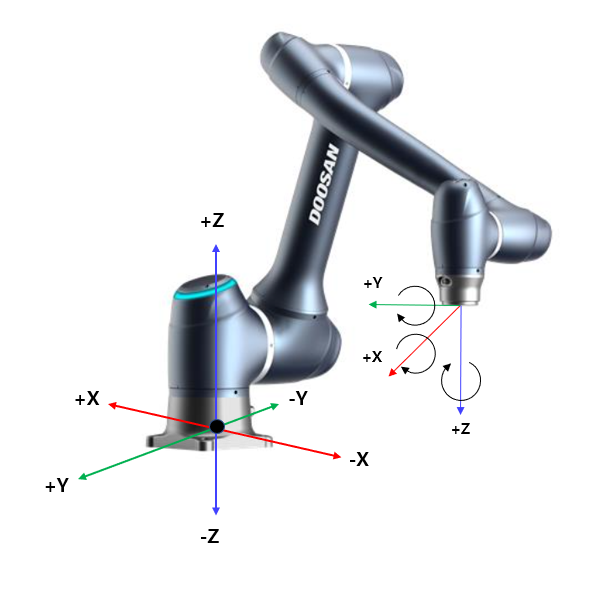
Následující postup představuje způsob, jak pohybovat robotem pomocí pohybu úkolu na obrazovce JOG:
-
Vyberte základní souřadnice. Robot lze přesunout podle SOUŘADNIC ZÁKLADNY nebo NÁSTROJE.
-
Vyberte směr pohybu. Lze například vybrat osu X.
-
Stisknutím tlačítka +/- robot přesunete. Robot se pohybuje při stisknutí tlačítka +/- a aktuální poloha se zobrazuje na obrazovce v reálném čase.
Další informace o pohybu vybočení, pohybu a zarovnání viz (2.11.0.1_temp-cs_CZ) Obrazovka pojíždění, Obrazovka Pohyb resp. . Obrazovka Zarovnat
-
Pokud je přepínač aktuálního režimu v levé horní části obrazovky krokování vypnutý, robot se pohybuje pouze na virtuální obrazovce v levé části obrazovky krokování. Skutečný robot se pohybuje, pokud je zapnutý přepínač aktuálního režimu.