Povinné Snadné 1 min

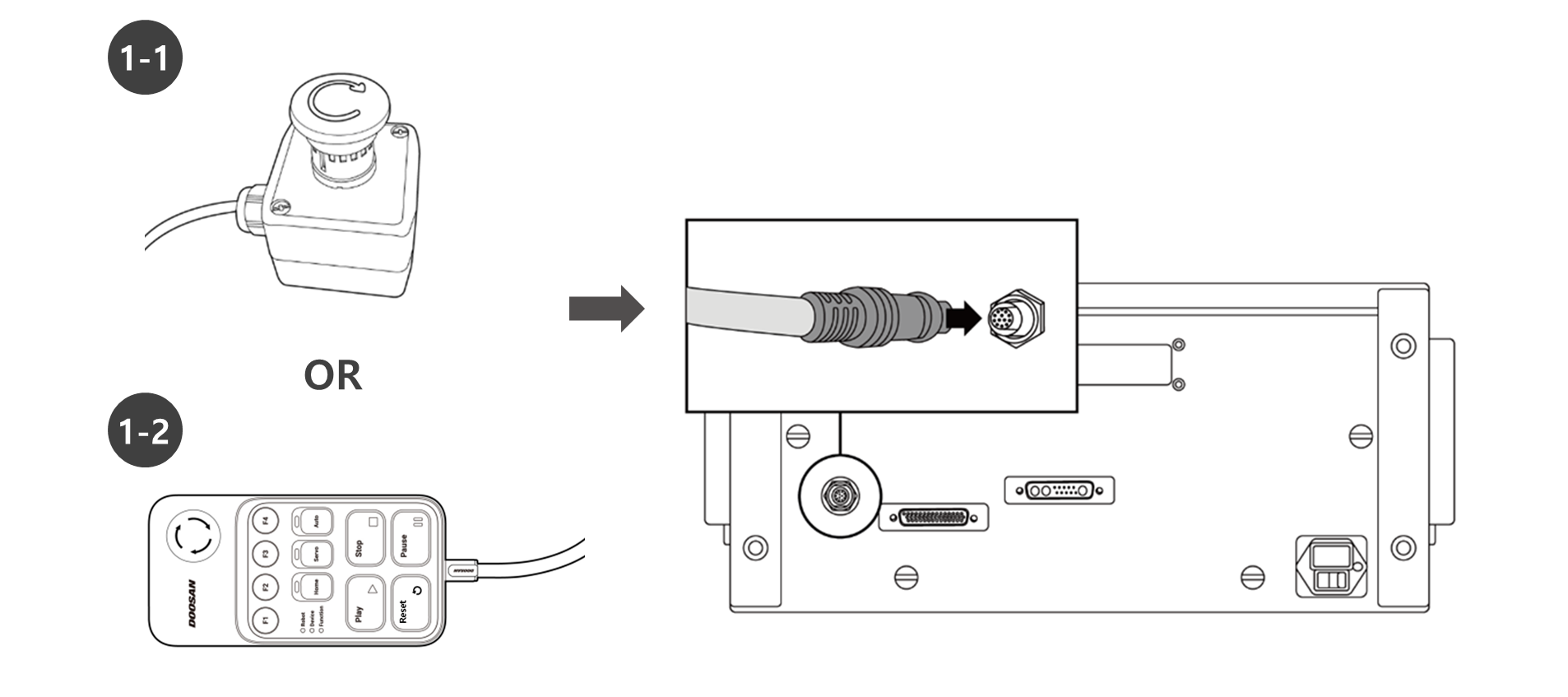
V případě řady A připojte kabel tlačítka nouzového zastavení nebo inteligentní závěsné zařízení (volitelné). Připojte závěsné zařízení Teach (volitelné) a kabely robota k řídicí jednotce.
-
Připojte kabel tlačítka nouzového zastavení nebo kabel inteligentního závěsného zařízení (volitelný) k příslušnému konektoru řídicí jednotky a zajistěte šroub otočením ve směru hodinových ručiček, aby se kabel neuvolnil.
-
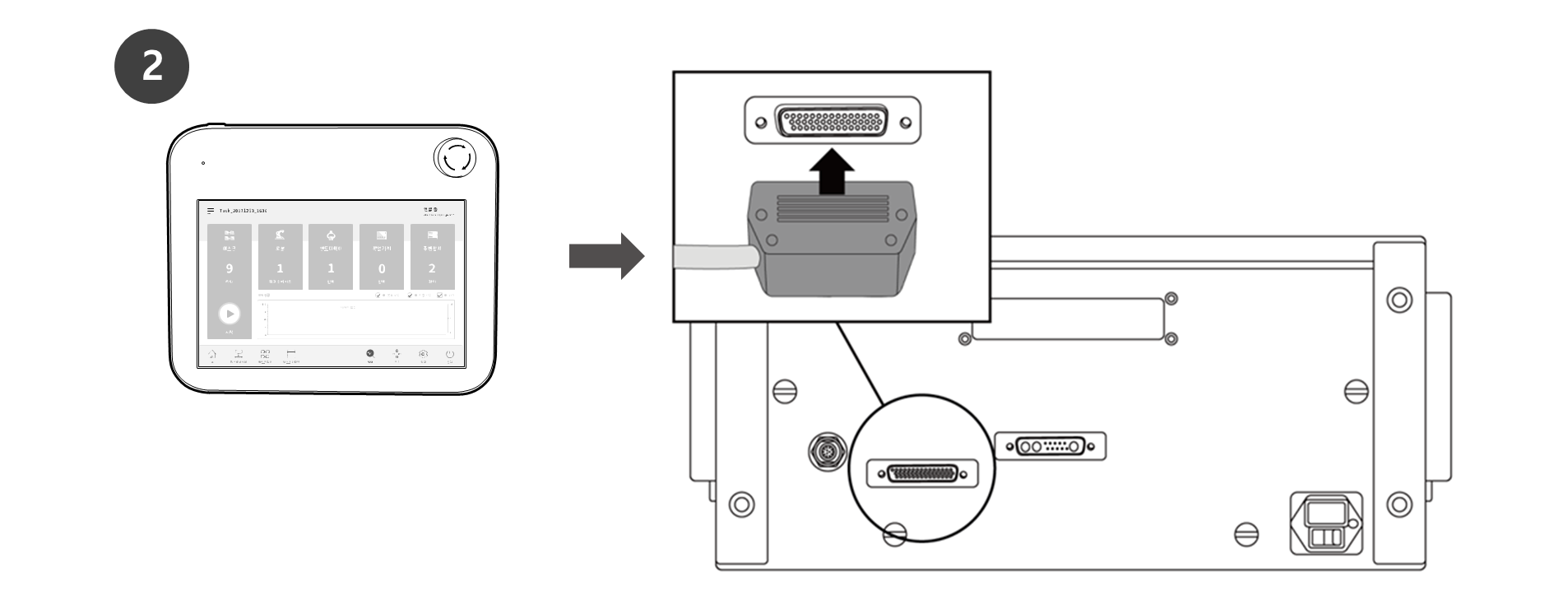
Zatlačte kabel jednotky učení (volitelný) do odpovídajícího konektoru řídicí jednotky, dokud neuslyšíte cvaknutí. Tím zabráníte uvolnění kabelu.
-
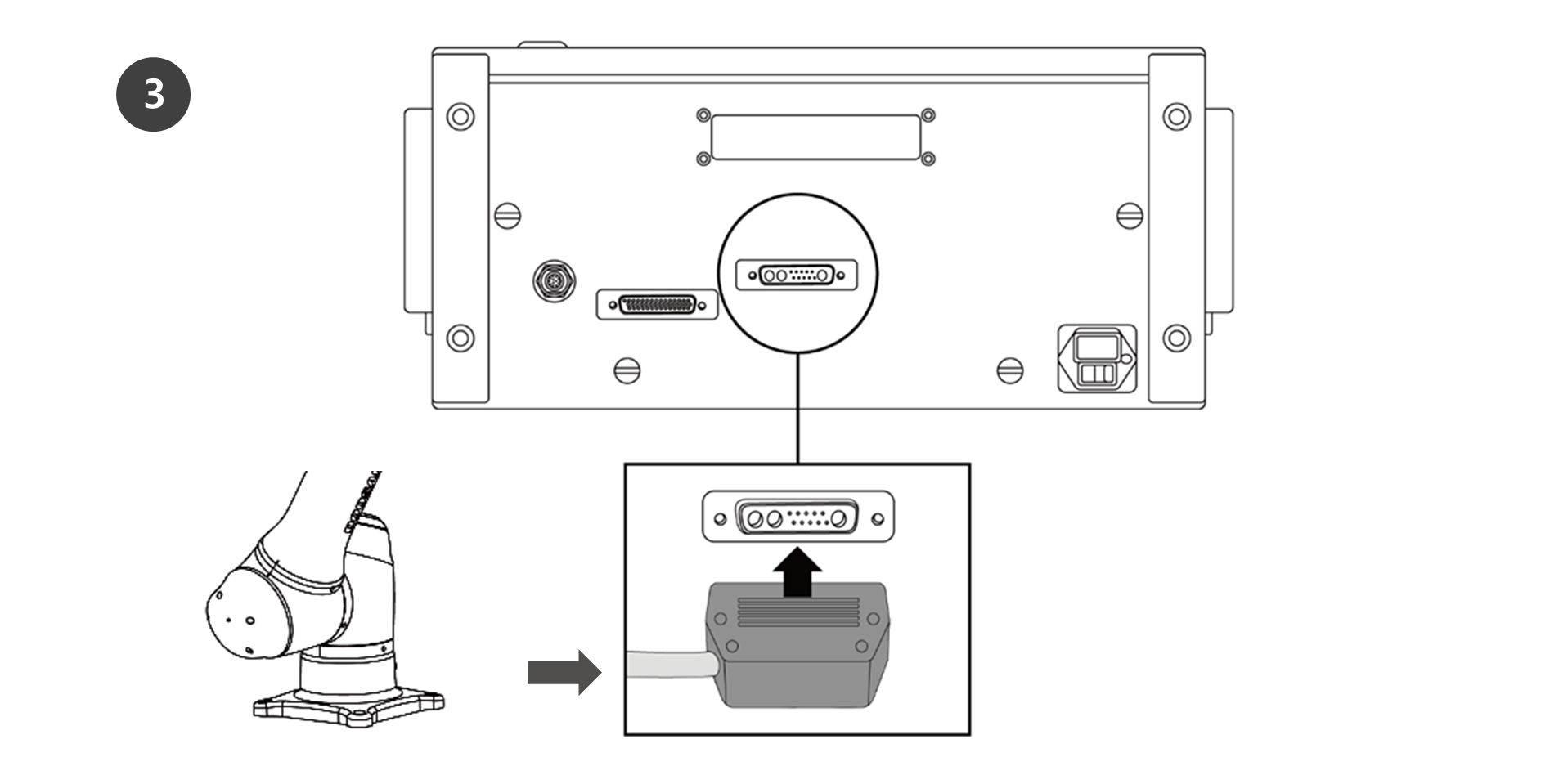
Zatlačte opačný konec kabelu robota do odpovídajícího konektoru řídicí jednotky, dokud neuslyšíte cvaknutí, aby nedošlo k uvolnění kabelu.
-
Před připojením kabelu zkontrolujte, zda nejsou kolíky na konci kabelu poškozené nebo ohnuté.
-
Pokud hluk generovaný elektromagnetickými vlnami způsobuje problémy, je nutné nainstalovat feritové jádro, aby byl zajištěn normální provoz. Další informace o umístění instalace feritového jádra naleznete v následujících informacích:(2.11.0.1_temp-cs_CZ) Připojení manipulátoru a ovladač(2.11.0.1_temp-cs_CZ) Připojení ovladač a chytrého ovladače(2.11.0.1_temp-cs_CZ) Připojení ovladač a učícího ovladače