必須 簡単 5 分
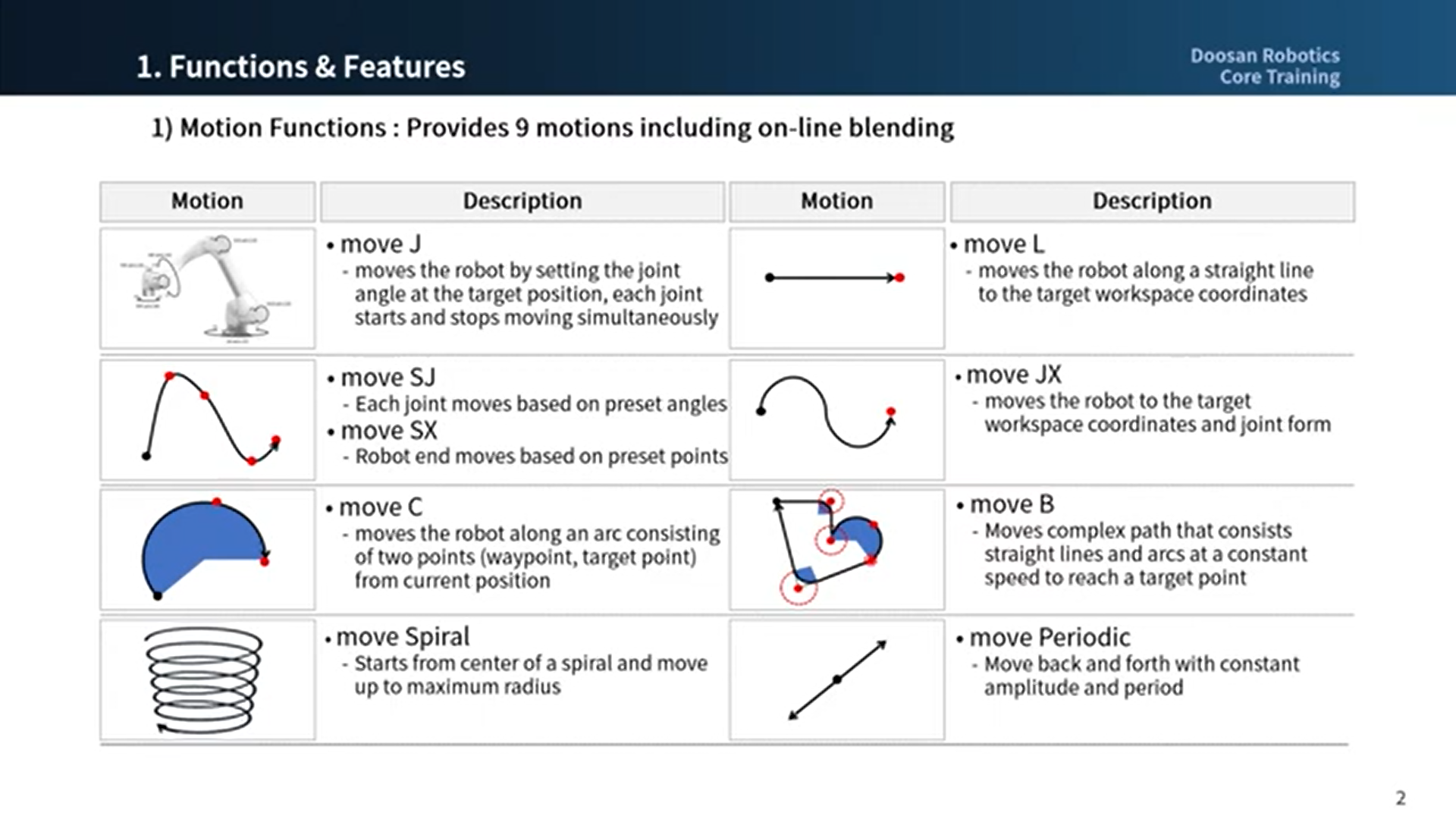
斗山ロボットは9つの運動を提供している。ロボットの動作は、標準動作、 MoveJ および MoveL 、およびこれら 2 つの動作から派生した 7 つの動作によって制御されます。
ロボットモーションのタイプ
|
|
モーション( Motion ) |
フィーチャー( Feature ) |
|---|---|---|
|
|
MoveJ |
ロボットの各ジョイントは、現在の角度からターゲット角度に移動し、同時に停止します
|
|
|
MoveL |
ロボットは TCP をまっすぐに維持しながら、ターゲット点に移動します
|
|
|
MoveSJ |
ロボットはロボットが設定したすべての角度で移動する
|
|
|
MoveSX |
ロボットTCPはすべてのポイントを移動する
|
|
|
MoveJX |
ロボットのポーズは、ロボット TCP がターゲット点に移動するときに指定されます
|
|
|
MoveC |
ロボット TCP は、円弧を維持しながらターゲット点に移動します 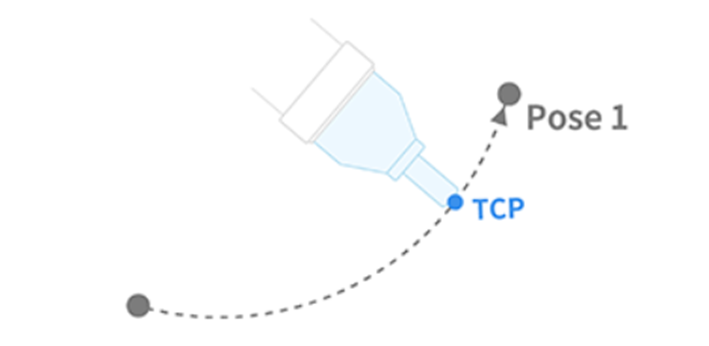
|
|
|
MoveB |
ロボットは、連続した直線と円弧で構成されるセクションを通過して、最終的なターゲット点に移動します 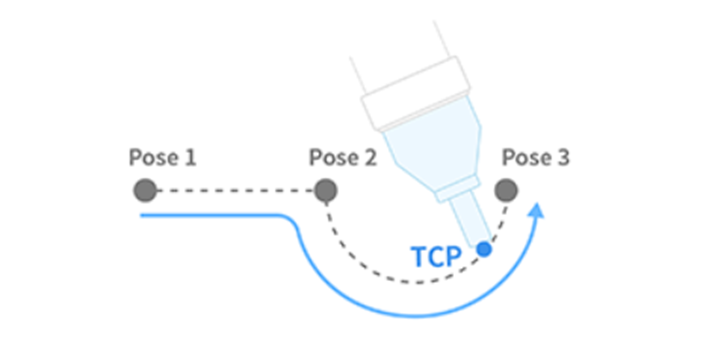
|
|
|
MoveSpiral |
ロボットがスパイラルの中心から最大半径に移動します 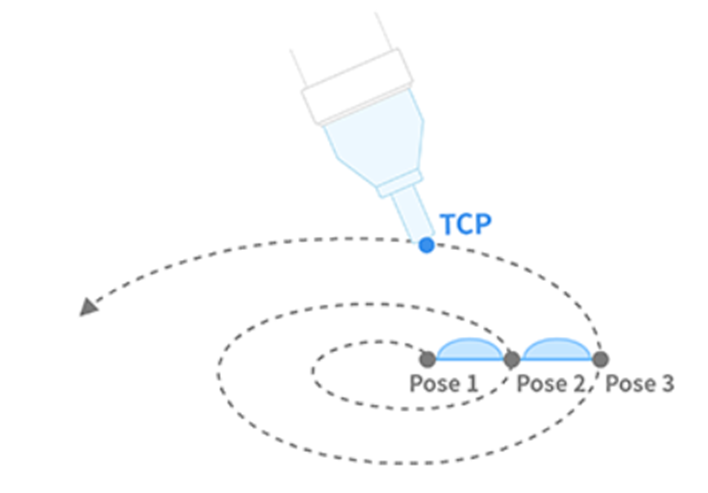
|
|
|
MovePeriodic |
ロボットは一定の振幅とサイクルでパス内を移動します 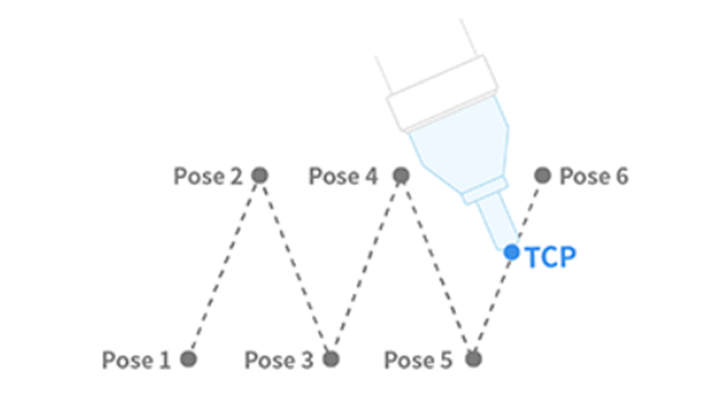
|
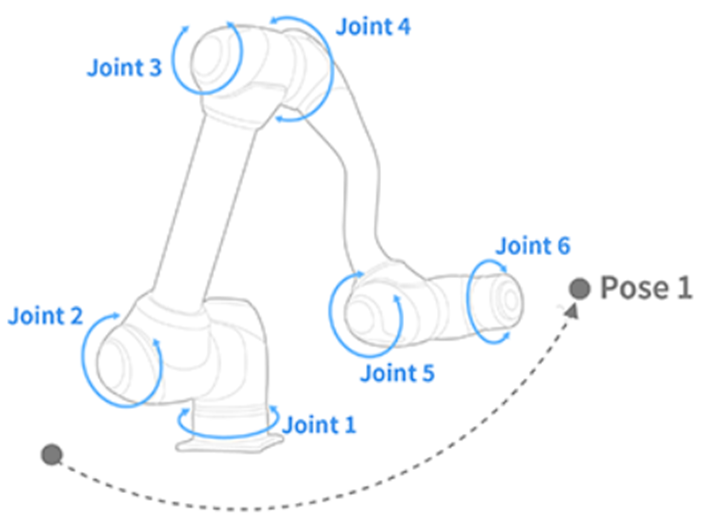
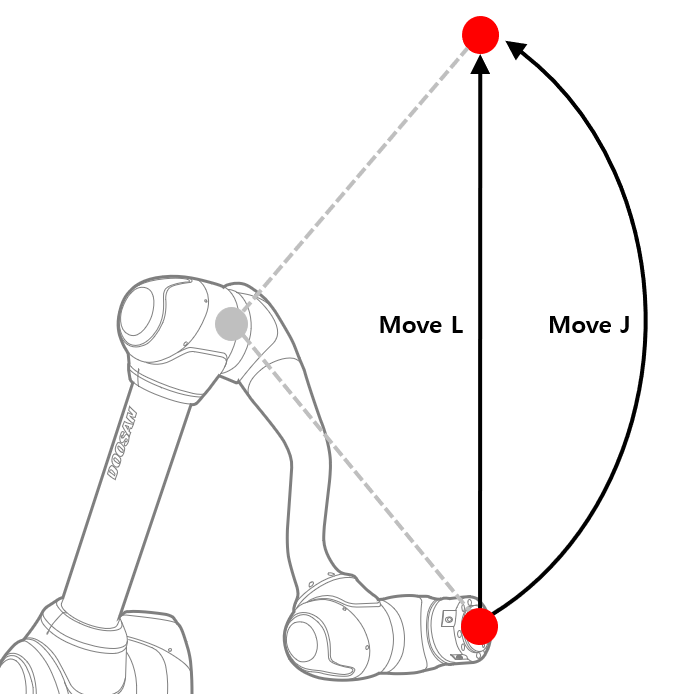
MoveJ および MoveL
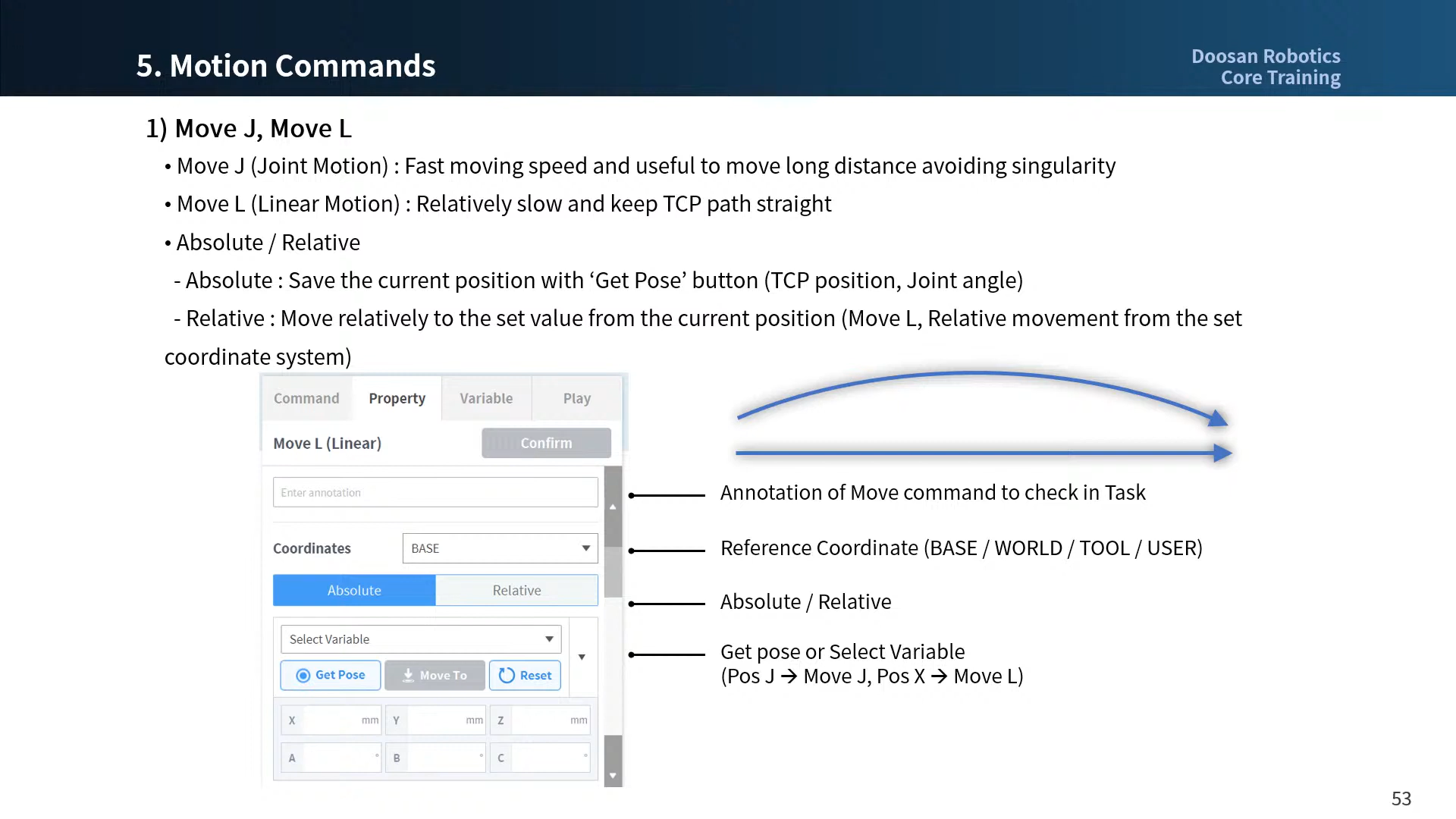
ロボットモーションを使用する前に、 MoveJ および MoveL の標準動作を理解しておくことが重要です。
-
MoveJ の J はジョイントを参照します。この動作では、各ジョイントはターゲット角度に移動し、同時に停止します。
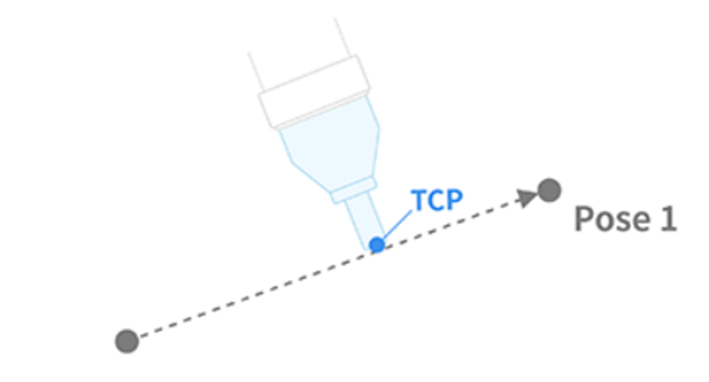
-
MoveL の L は線形を参照します。この動作では、ロボット端の TCP は、線形動作でターゲットポーズ(位置と角度)に移動します。
|
|
タイプ( Type ) |
MoveJ |
MoveL |
|---|---|---|---|
|
1. |
Move メソッド |
|
|
|
2. |
利点 |
|
|
|
3. |
欠点 |
|
|
|
4. |
使用率 |
|
|