オプション ハード 20 分
強制制御とコンプライアンス制御は、ロボットの力を制御する機能です。これらの機能は、動作コマンドが追加された場合に、動作動作の実行と強制制御も制御します。コンプライアンス管理と強制制御には、次のような違いがあります。
-
コンプライアンス管理
-
ロボットは、コンプライアンス制御中にロボットエンド TCP で外部力に準拠しています。外部力が除去されると、ロボットを元の位置に戻す力が作成され、ロボットが対応する位置に移動します。
-
これは、ロボットやサーフェスに損傷を与えることなく、平らでないサーフェス上で線形動作が必要な場合に使用できます。ワークピースの周囲で予期しない衝突を防止するために使用できます。
-
-
強制制御
-
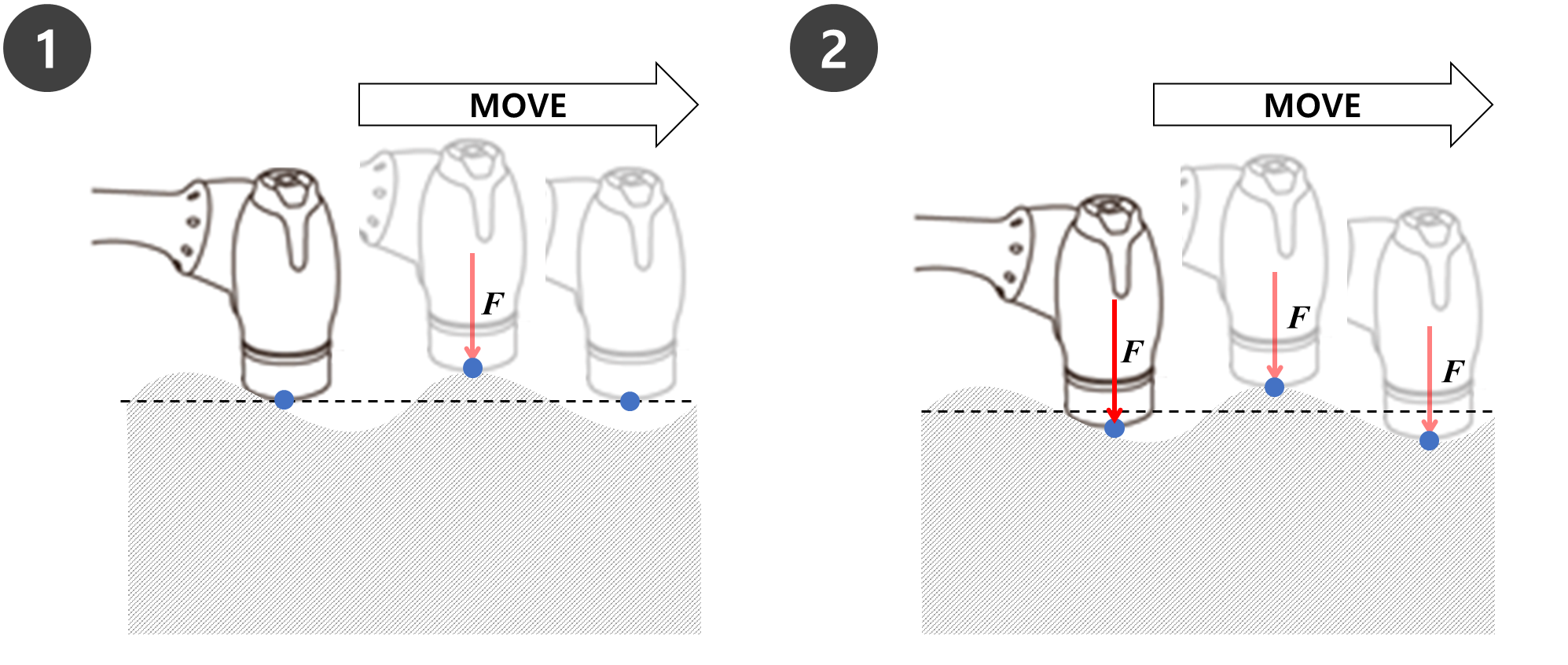
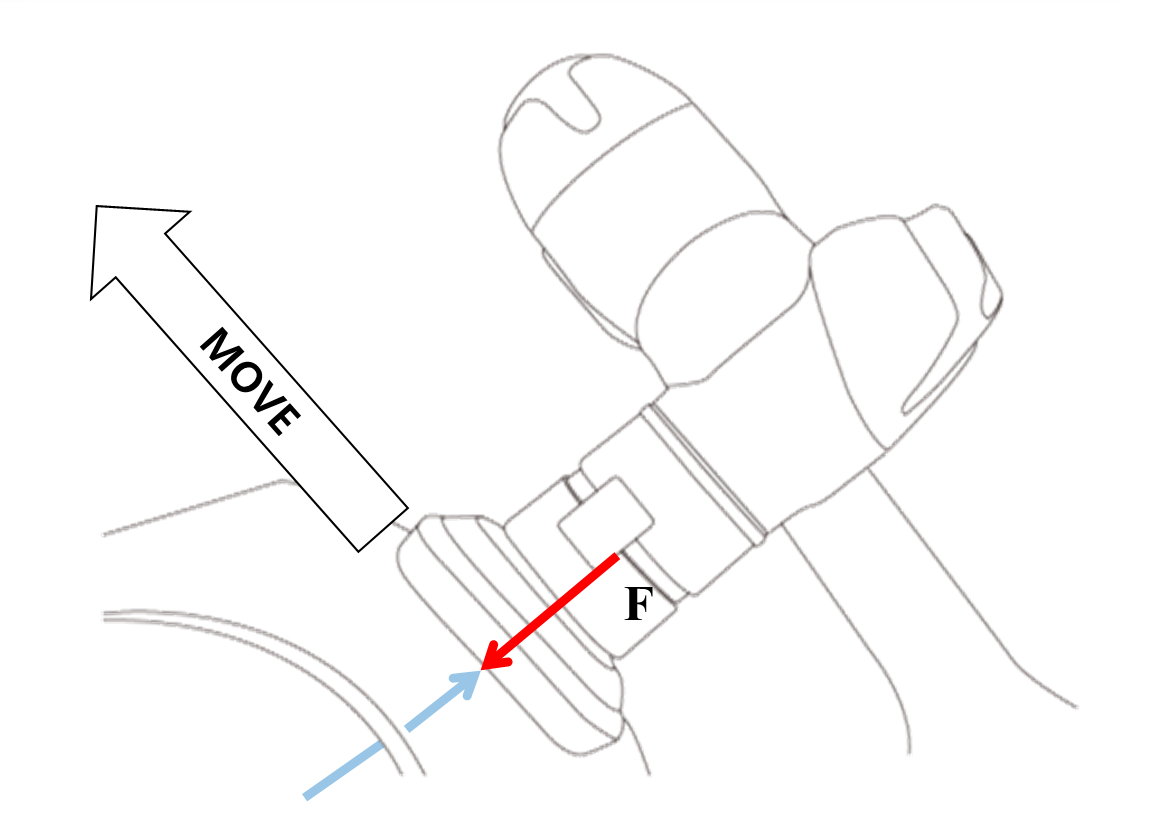
力の制御中に、ロボットエンド TCP で力が生成されます。加速度は、力が生成される方向に生成されるため、ロボットは動作方向と力方向に同時に移動します。
-
オブジェクトと接触すると、オブジェクトの設定力と反発力がバランスを形成するまで、オブジェクトに力が適用されます。
-
不均一なサーフェス上の線形モーションに等しい力を適用する必要がある場合に使用できます。これは、研磨など、移動中に一定の力が必要な作業で使用できます。
-
注意
順応制御および力制御は、特異点によって影響を受ける可能性があり、振動を引き起こすことがあります。特異点付近での使用を避け、注意してください。
注
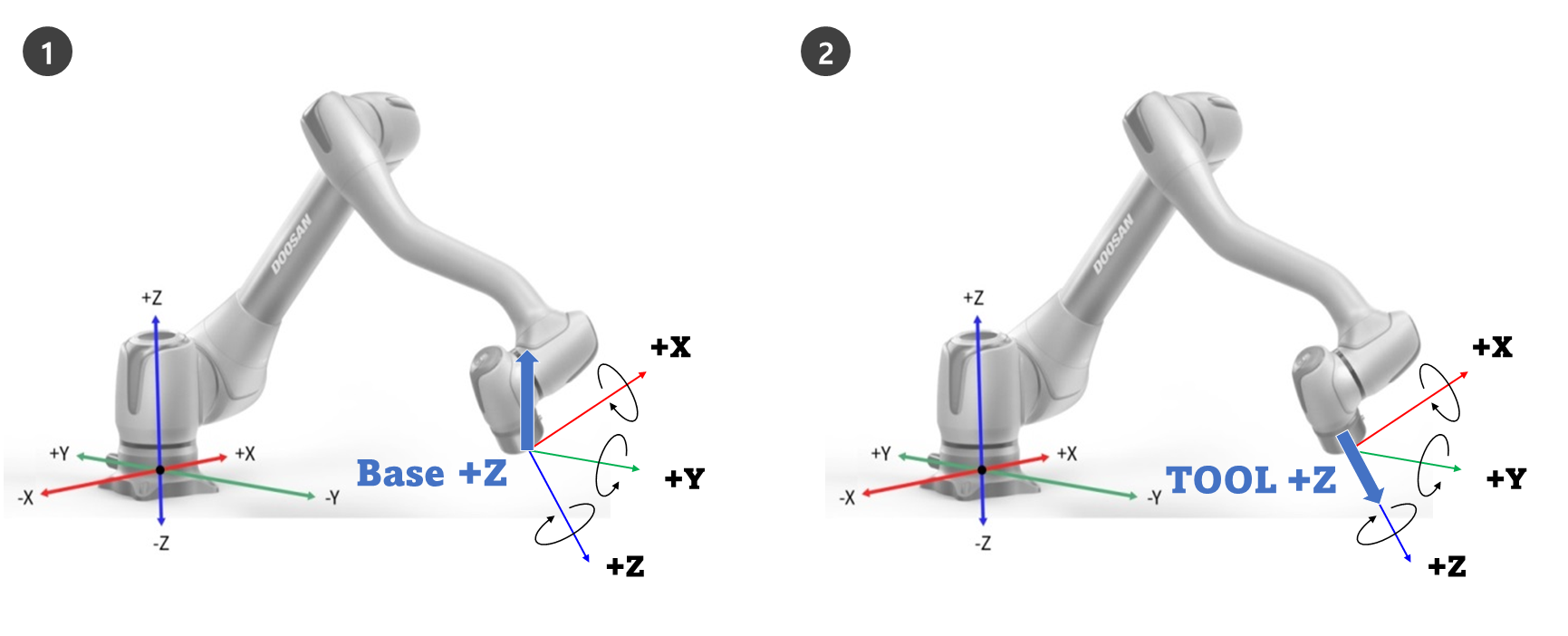
コンプライアンスコマンドと強制コマンドは、現在の座標に基づいて実行されます。タスクのデフォルトの座標はベース座標であり、座標は [ 設定( Set ) ] コマンドで変更できます。
-
図 1 は、 +Z 方向の力 / コンプライアンス制御がベース座標に適用されるときの操作方向です。
-
図 2 は、 +Z 方向の力 / コンプライアンス制御が工具座標に適用されるときの操作方向です。
コンプライアンス管理
コンプライアンス制御は、ロボットエンド TCP に力が適用されたときに設定された剛性に従って外部力に準拠する機能です。ターゲット点での力のバランスをとります。これは、バランス点から離れた場所で変位が発生した場合に反発力を生成する制御方法です。コンプライアンス制御中、ロボットエンドはスプリングのようにバウンスします。
-
モーションコントロールを単独で使用した場合に衝突が発生すると、衝突したオブジェクトが損傷する可能性があります。
-
Doosan Robotics ロボットは、衝突が発生すると安全に停止しますが、ユーザー設定 安全限界(Safety Limits)> 衝突感度(Collision Sensitivity) など によっては、次の状況が発生する場合があります。
-
-
動作制御中にコンプライアンス制御がオンに設定されている場合、ロボットは衝突したオブジェクトに準拠しながら移動します。
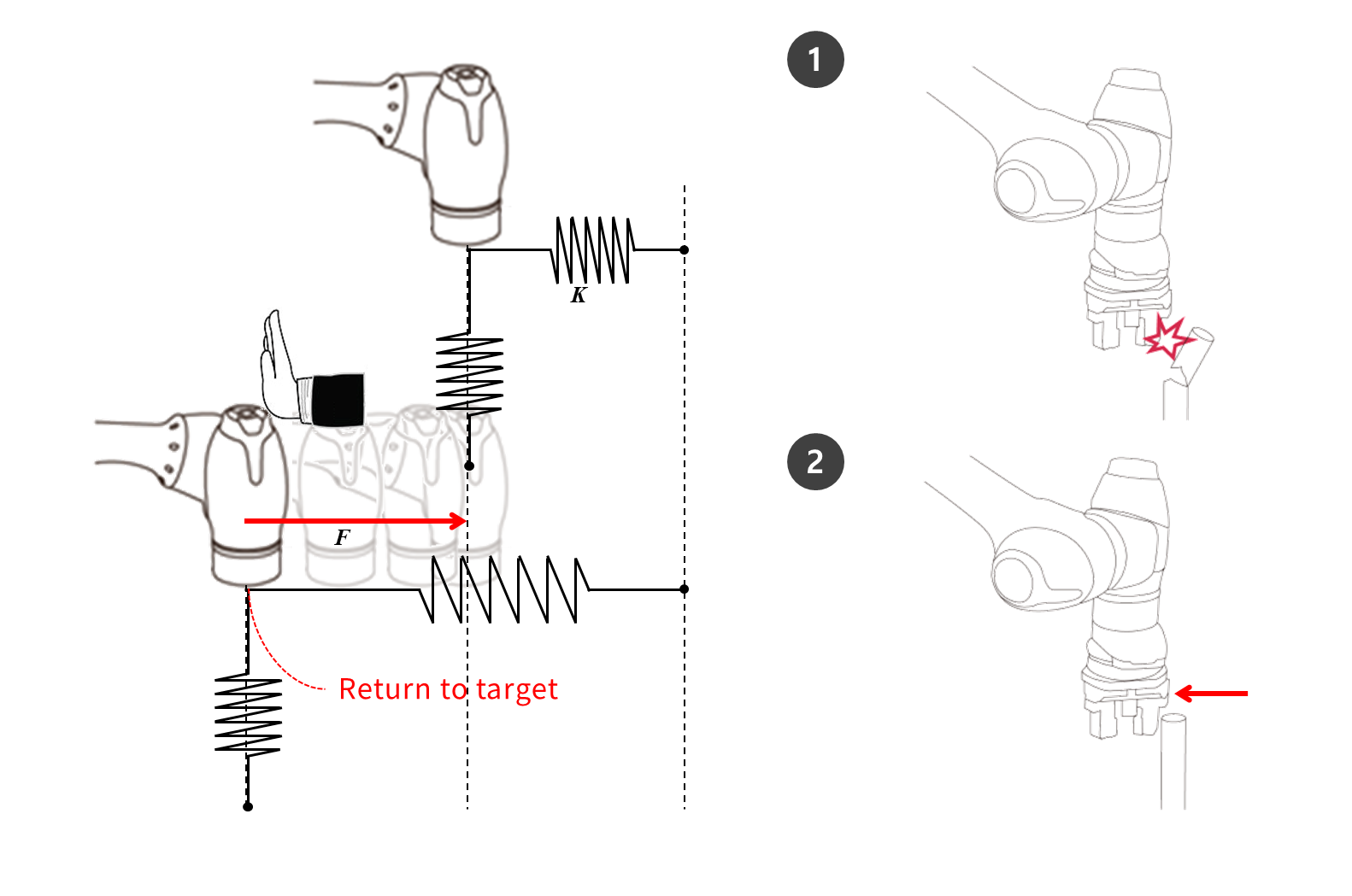
F が外部力、 K が剛性、 X が距離の場合、次の式は真です。
-
F = K * X
-
K = F/X
-
X = F/K
上記の式に基づいて、コンプライアンス制御の剛性が 1000N/m に設定され、ロボットが 1 mm 移動すると、生成される外部力は 1N になります。
-
F = 1000 N/m * 0.001 m = 1 N ( 0.001 m = 1 mm )
注
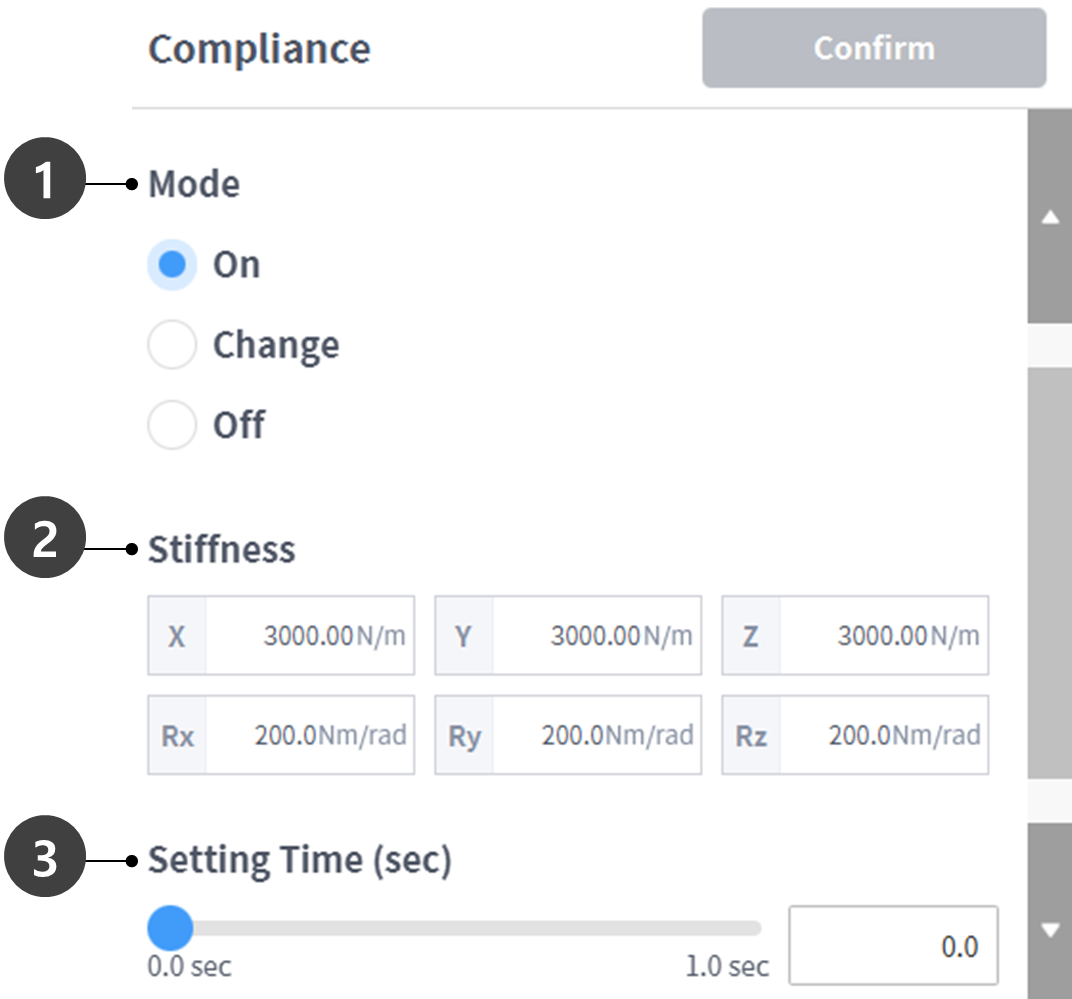
コンプライアンスコマンドのプロパティでは、次の値を設定できます。
-
モード( Mode )
-
オン:コンプライアンス管理を有効にします
-
変更:コンプライアンスモードがオンに設定されている場合、剛性に変わります
-
オフ:コンプライアンス制御を無効にします
-
-
剛性範囲
-
M/H Series : Translation(0~20000N/m), Rotation(0~1000Nm/rad)
-
A Series : Translation(0~10000N/m), Rotation(0~300Nm/rad)
-
剛性値を小さくすると、外部力により穏やかに応答し、ターゲット点に戻るためにより多くの時間が必要になります
-
-
時刻の設定
-
現在の剛性値が設定された剛性値( 0 ~ 1 秒)に達するまでに必要な時間です
-
注意
-
工具重量と TCP (工具中心点)を正確に設定する必要があります。工具重量が不正確な場合、ロボットは工具重量を外部荷重として検出し、 [ 適合性( Compliance ) ] コマンドをオンに設定すると、位置エラーが発生します。
-
ドレスパックの張力により、ロボットに外部トルクが発生する場合があります。そのため、ドレスパックを取り付ける際は注意してください。
-
非同期動作またはブレンド動作が実行されている間は、コンプライアンスをオンまたはオフにすることはできません。
-
コンプライアンスコマンドをオンにすると、線形動作のみが許可されます。MoveJ や MoveSJ などのジョイント動作は許可されていません。
-
の [ 適合性( Compliance ) ] コマンドの実行中は、工具重量または TCP は変更できません。
-
[ コンプライアンス( Compliance ) ] コマンドをオンにすると、動作実行中に生成されたトルクのコンプライアンスにより、ターゲット点に正確に到達できなくなります。したがって、目標点付近でコンプライアンス制御をオンにすることをお勧めします。または、大きな剛性値を設定することで、位置エラーを最小限に抑えることができます。
力制御( Force Control )
力制御は、設定された力と反発力がバランスを形成するまで、力制御方向に力を適用する機能です
-
ロボットが設定された力方向に移動し、オブジェクトと接触すると、入力された力( N )が維持されます。
-
一定の力を適用しながら、力の方向とは異なる方向にモーションコントロールを行うことができます
-
最小設定は +/-10N で、 0.2N の解像度で微調整できます
-
力制御( Force Control )は特異性ゾーンでは使用できません
-
一般に、コンプライアンス制御は、強制制御と組み合わせて使用され、強制制御は外部の力に準拠します
注
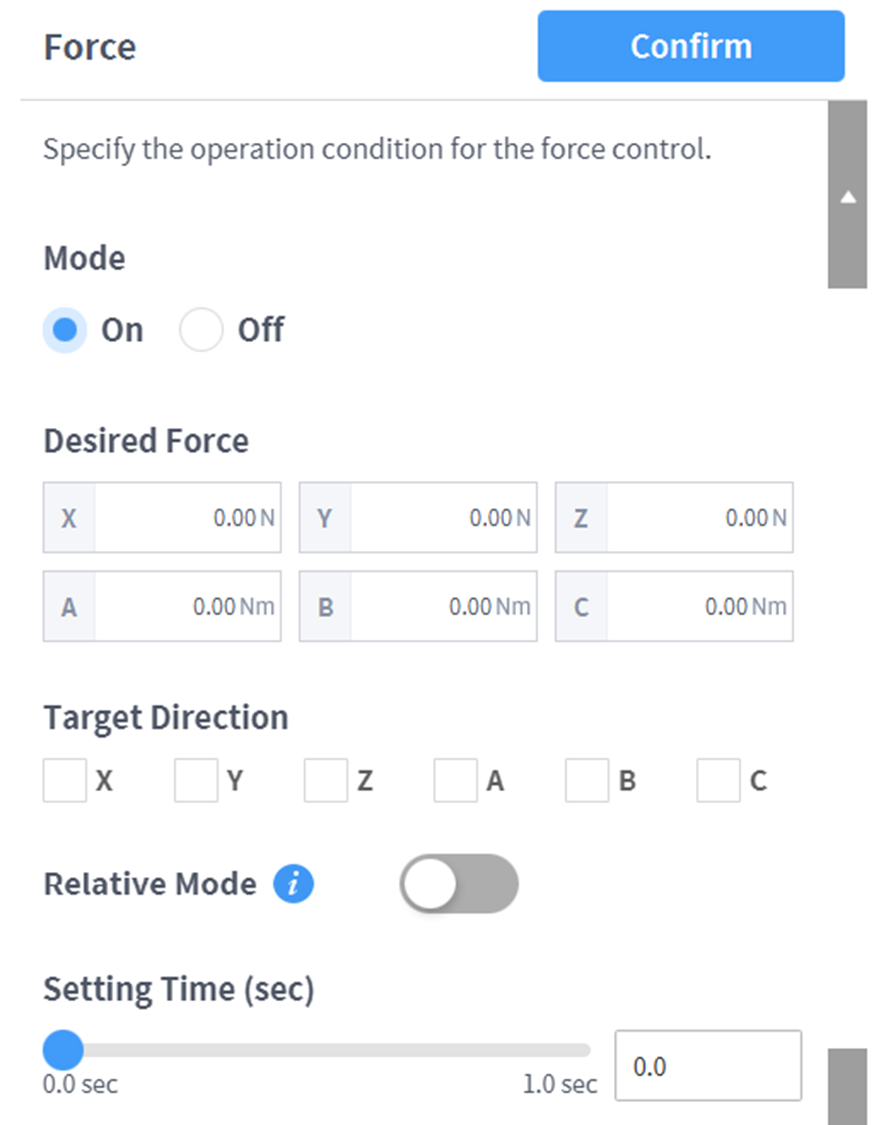
[ 力 ] コマンドのプロパティから、次の値を設定できます。
-
モード( Mode )
-
オン:強制制御を有効にします
-
オフ:強制制御を無効にします
-
-
必要な力範囲
-
X 、 Y 、 Z :10 - (各ロボットの最大) N
-
A 、 B 、 C :5- (各ロボットの最大) Nm
-
最大力の詳細については、を参照 安全パラメータの上下限の範囲と基本値してください。
-
-
ターゲット方向( Target Direction )
-
各方向の選択したターゲット値に移動します。
-
複数の選択が可能です。
-
強制制御は、力設定後に方向設定でのみ実行できます。
-
複数選択した方向の 1 つがターゲット力に達すると、もう一方の方向のターゲット値に達するまで移動を続けます。
-
-
相対モード( Relative Mode )
-
このモードを有効にすると、ロボットに適用された外部力を 0 にキャリブレーションして、力制御精度を向上させます。
-
相対モードが無効な場合、ターゲットに適用される実際の力は、設定された力と外部力の合計と等しくなります。
-
相対モードが有効な場合、ターゲットに適用される実際の力は設定された力と等しくなります。
-
-
力制御中に、姿勢または外部力に応じて偏差が発生することがあります。
-
力制御中は、正確なターゲット点に到達できません。そのため、ターゲットポイント付近で強制制御を有効にすることをお勧めします。
-
-
時刻の設定
-
現在の力の値が設定された力の値( 0 ~ 1 秒)に達するまでに必要な時間です
-