オプション 標準( Normal ) 5 分
Sub は Subroutine の略語です。サブルーチンとは、 2 つ以上の重複パーツが存在する場合に必要なパーツを呼び出すことによって、プログラム内のステップ数を最小限に抑えるプロセスのことです。
-
Doosan Robotics ロボットには、サブコマンドと対応するサブ段落を呼び出す CallSub コマンドが用意されています。
-
Sub コマンドは Python で定義されているように機能します。
-
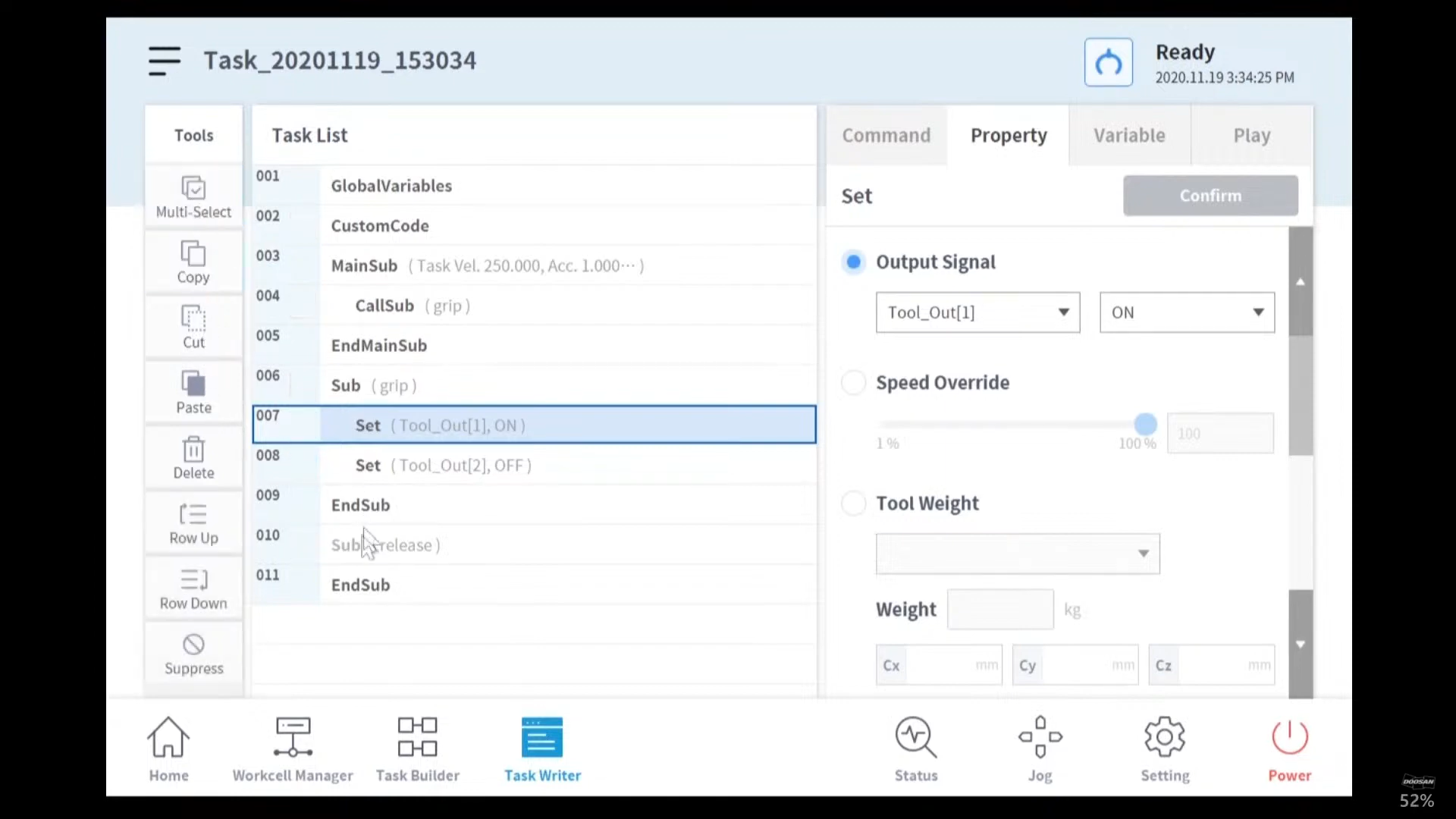
サブ段落は、 MainSub 、 Main 段落の先頭、および Main 段落の末尾である EndMainSub に追加する必要があります。
-
繰り返しに加えて、「サブ」コマンドを使用してメイン段落を単純化することもできます。サブコマンドを使用すると、現在実行されているメイン段落のタスクを直感的に識別できます。
-
サブコマンドを使用すると、サブ段落単位のテストが可能になります。
ロボットグリッパーのグリップおよびリリース動作を実行するためにサブコマンドを使用するサンプルは、次のもので構成されています。
-
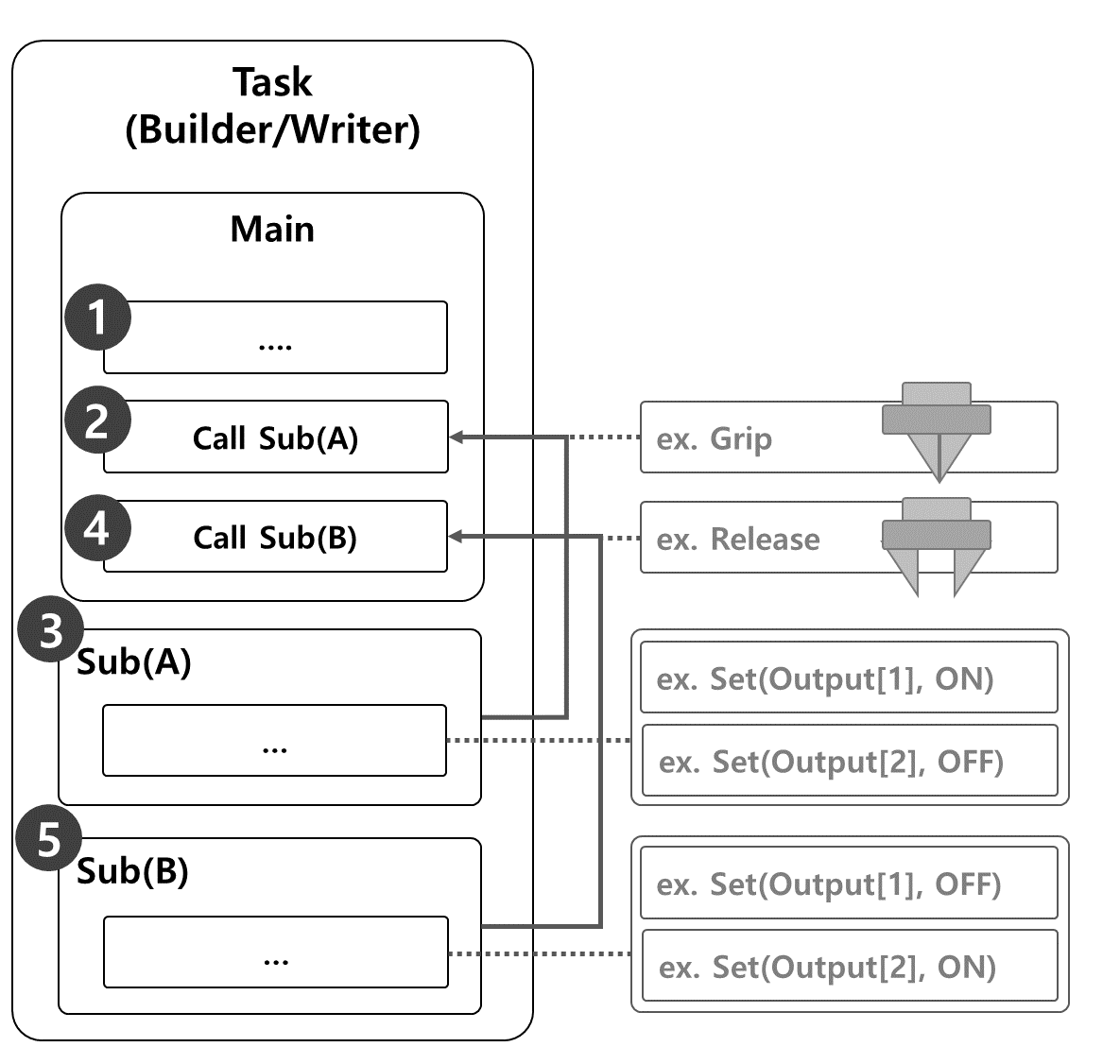
メイン段落の行は、最初の行から順番にタスクプログラムを実行します。
-
コールサブによって呼び出されるサブ( A )に移動します。サンプルプログラム:Grip サブルーチンを呼び出します。ロボット:動作しません。
-
サブ( A )が実行されます。すべてのサブ段落行は順番に実行され、メイン段落に戻り、次の行が実行されます。サンプルプログラム:Grip サブルーチンラインを順番に実行します。Set コマンドを使用して、 Output[1] をオンに、 Output[2] をオフに設定します。ロボット:ロボットグリッパーがグリップ動作を実行します。
-
コールサブによって呼び出されたサブ( B )に移動します。サンプルプログラム:Release サブルーチンを呼び出します。ロボット:動作しません。
-
サブ( B )が実行されます。すべてのサブ段落行は順番に実行され、メイン段落に戻り、次の行が実行されます。サンプルプログラム:Grip サブルーチンラインを順番に実行します。出力 [1] をオフに設定し、出力 [2] をオンに設定するには、 [ 設定 ] コマンドを使用します。ロボット:ロボットグリッパーがリリースモーションを実行します。
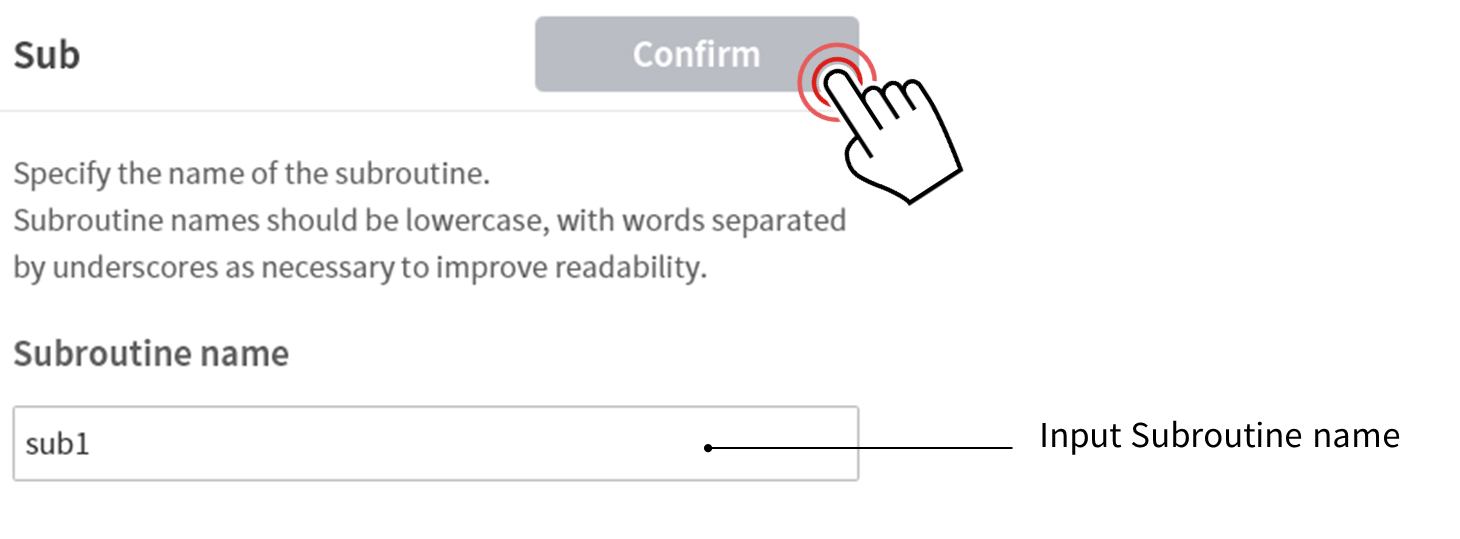
サブコマンドを追加( Add Sub Command
-
Task Builder または Task Writer から Sub コマンドを追加します。
-
サブルーチン名を入力する。
-
確認に進みます。
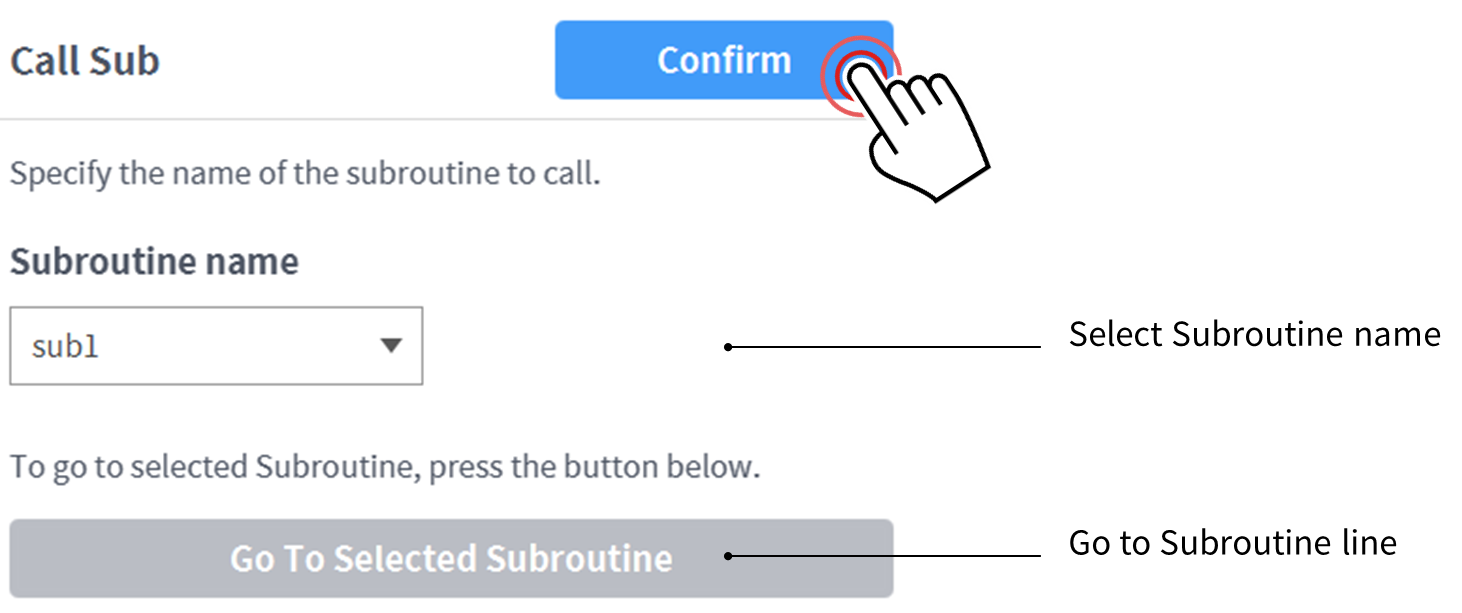
CallSub コマンドを追加します
-
Task Builder または Task Writer から CallSub コマンドを追加します。
-
サブコマンドに登録されているサブルーチン名を選択する。
-
確認に進みます。
-
タスクプログラムの行数が増加すると、サブルーチンの検索が困難になる場合があります。このような場合は、 CallSub コマンドのプロパティで選択したサブルーチンに移動( Go to Selected Subroutine )をタッチして、フォーカスを対応するサブコマンドラインに移動する。