オプション 簡単 3 分
ロボットのインストールポーズは、ロボットのインストールポーズ(マウント)ワークセル項目を追加することで設定できます。ロボットが平面にインストールされている場合は、このステップをスキップできます。
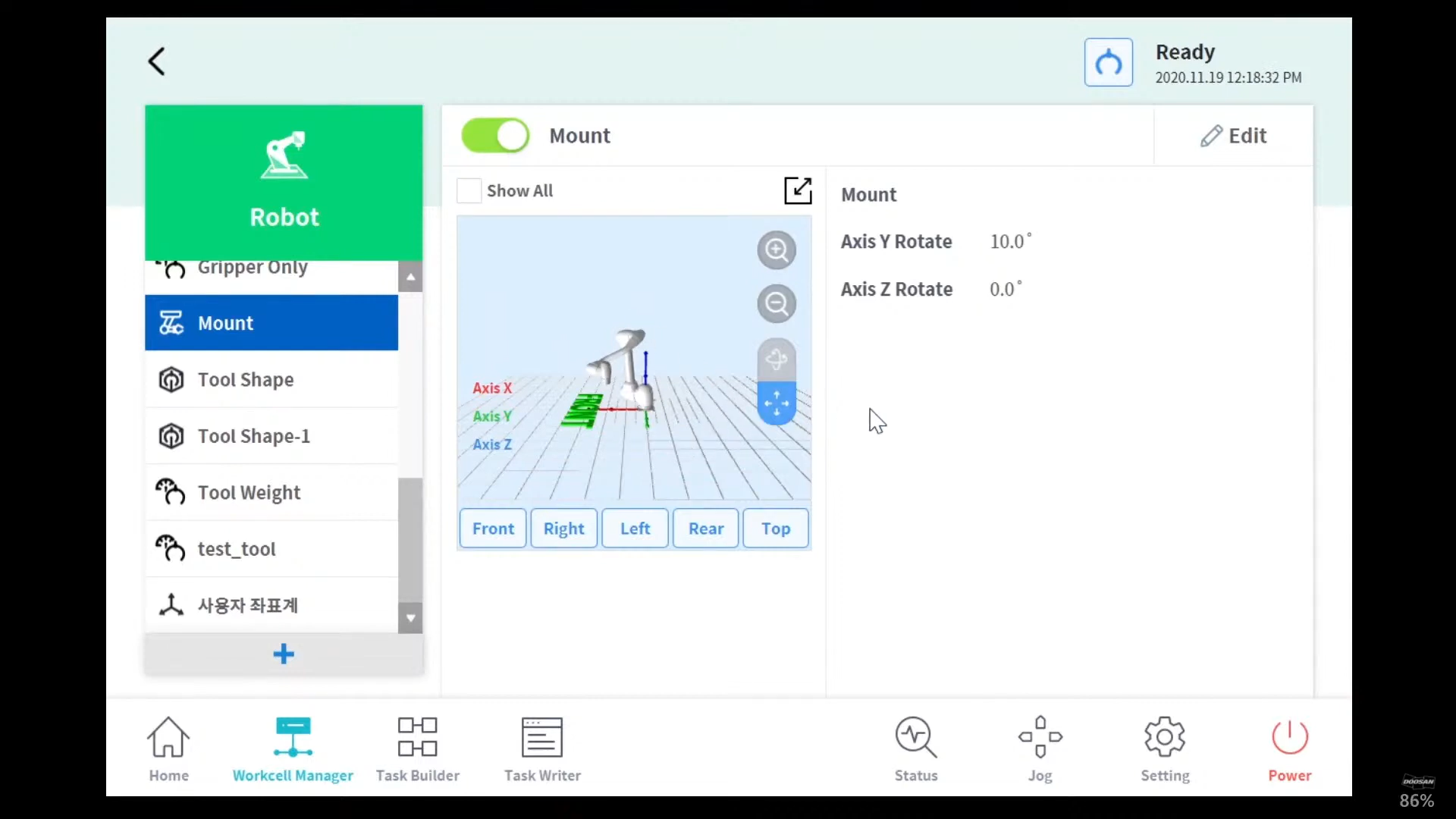
ロボットのインストールポーズは、 [ ワークセルマネージャー( Workcell Manager ) ]>[ ロボット( Robot ) ]>[ ロボット( Robot ) ]>[ マウント( Mount ) ] で設定でき 
-
取り付け角度は、自動測定機能を使用して測定できます。ただし、角度が 5 度未満の場合、自動測定は使用できません。
-
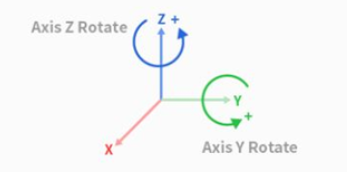
ロボットが天井または壁に取り付けられている場合、ロボットの取り付け角度は Y 軸と Z 軸の回転で設定できます。
-
自動工具重量計算は重力に基づいて実行されるため、マウント設定が完了したら工具重量をリセットすることをお勧めします。
ワークセル項目が登録(確認)されたら、ワークセル項目を使用するために切り替えスイッチを有効にする必要があります。
-
ロボットのインストールポーズ(マウント)ワークセル項目を設定する場合は、ワールド座標も変更することをお勧めします。ワールド座標が変更されない場合、ティーチペンダントのロボットシミュレータ画面にあるロボット姿勢が、平面上に設置されているロボットとして表示されます(基本)。